
10.05.2023

A versatile robot that would autonomously map, traverse, and explore previously inaccessible destinations is being put to the test at NASA’s Jet Propulsion Laboratory.
How do you create a robot that can go places no one has ever seen before – on its own, without real-time human input? A team at NASA’s Jet Propulsion Laboratory that’s creating a snake-like robot for traversing extreme terrain is taking on the challenge with the mentality of a startup: Build quickly, test often, learn, adjust, repeat.
Called EELS (short for Exobiology Extant Life Surveyor), the self-propelled, autonomous robot was inspired by a desire to look for signs of life in the ocean hiding below the icy crust of Saturn’s moon Enceladus by descending narrow vents in the surface that spew geysers into space. Although testing and development continue, designing for such a challenging destination has resulted in a highly adaptable robot. EELS could pick a safe course through a wide variety of terrain on Earth, the Moon, and far beyond, including undulating sand and ice, cliff walls, craters too steep for rovers, underground lava tubes, and labyrinthine spaces within glaciers.
“It has the capability to go to locations where other robots can’t go. Though some robots are better at one particular type of terrain or other, the idea for EELS is the ability to do it all,” said JPL’s Matthew Robinson, EELS project manager. “When you’re going places where you don’t know what you’ll find, you want to send a versatile, risk-aware robot that’s prepared for uncertainty – and can make decisions on its own.”
JPL’s EELS (Exobiology Extant Life Surveyor) was conceived of as an autonomous snake robot that would descend narrow vents in the icy crust of Saturn’s moon Enceladus to explore the ocean hidden below. But prototypes of have been put to the test to prepare the robot for a variety of environments.
The project team began building the first prototype in 2019 and has been making continual revisions. Since last year, they’ve been conducting monthly field tests and refining both the hardware and the software that allows EELS to operate autonomously. In its current form, dubbed EELS 1.0, the robot weighs about 220 pounds (100 kilograms) and is 13 feet (4 meters) long. It’s composed of 10 identical segments that rotate, using screw threads for propulsion, traction, and grip. The team has been trying out a variety of screws: white, 8-inch-diameter (20-centimeter-diameter) 3D-printed plastic screws for testing on looser terrain, and narrower, sharper black metal screws for ice.
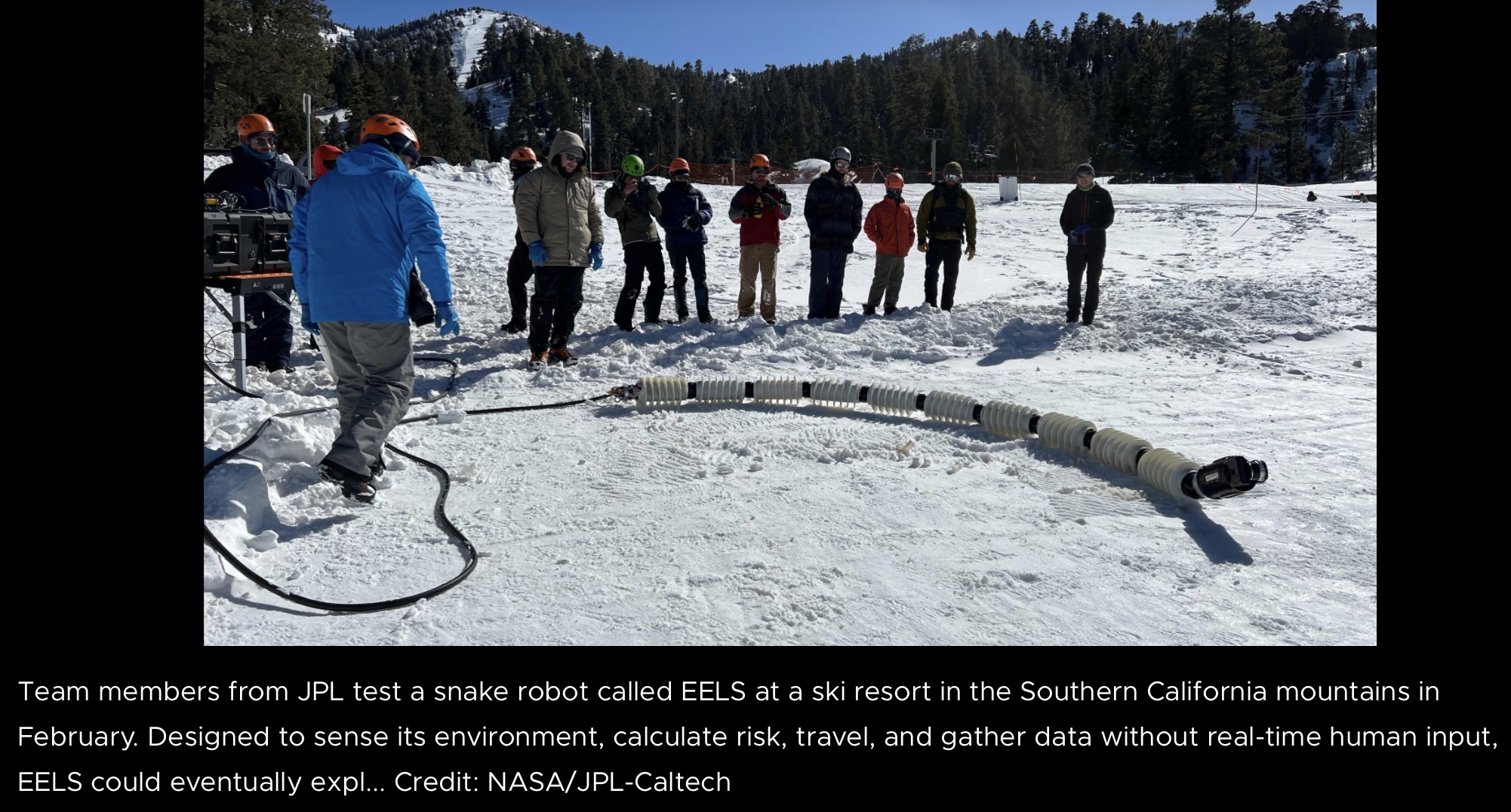
The robot has been put to the test in sandy, snowy, and icy environments, from the Mars Yard at JPL to a “robot playground” created at a ski resort in the snowy mountains of Southern California, even at a local indoor ice rink.
“We have a different philosophy of robot development than traditional spacecraft, with many quick cycles of testing and correcting,” said Hiro Ono, EELS principal investigator at JPL. “There are dozens of textbooks about how to design a four-wheel vehicle, but there is no textbook about how to design an autonomous snake robot to boldly go where no robot has gone before. We have to write our own. That’s what we’re doing now.”
How EELS Thinks and Moves
Because of the communications lag time between Earth and deep space, EELS is designed to autonomously sense its environment, calculate risk, travel, and gather data with yet-to-be-determined science instruments. When something goes wrong, the goal is for the robot to recover on its own, without human assistance.


“Imagine a car driving autonomously, but there are no stop signs, no traffic signals, not even any roads. The robot has to figure out what the road is and try to follow it,” said the project’s autonomy lead, Rohan Thakker. “Then it needs to go down a 100-foot drop and not fall.”
EELS creates a 3D map of its surroundings using four pairs of stereo cameras and lidar, which is similar to radar but employs short laser pulses instead of radio waves. With the data from those sensors, navigation algorithms figure out the safest path forward. The goal has been to create library of “gaits,” or ways the robot can move in response to terrain challenges, from sidewinding to curling in on itself, a move the team calls “banana.”
In its final form, the robot will contain 48 actuators – essentially little motors – that give it the flexibility to assume multiple configurations but add complexity for both the hardware and software teams. Thakker compares the actuators to “48 steering wheels.” Many of them have built-in force-torque sensing, working like a kind of skin so EELS can feel how much force it’s exerting on terrain. That helps it to move vertically in narrow chutes with uneven surfaces, configuring itself to push against opposing walls at the same time like a rock climber.
Last year, the EELS team got to experience those kinds of challenging spaces when they lowered the robot’s perception head – the segment with the cameras and lidar – into a vertical shaft called a moulin at Athabasca Glacier in the Canadian Rockies. In September, they’re returning to the location, which is in many ways an analog for icy moons in our solar system, with a version of the robot designed to test subsurface mobility. The team will drop a small sensor suite – to monitor glacier chemical and physical properties – that EELS will eventually be able to deploy to remote sites.