
3.12.2019
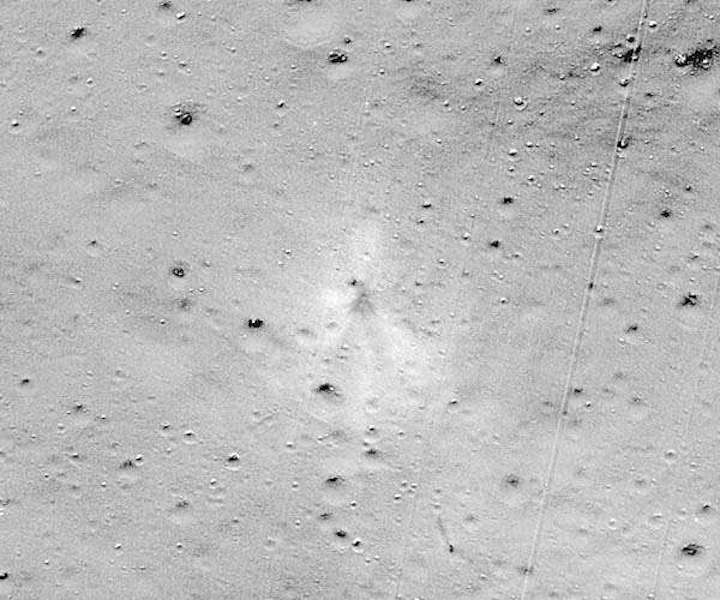
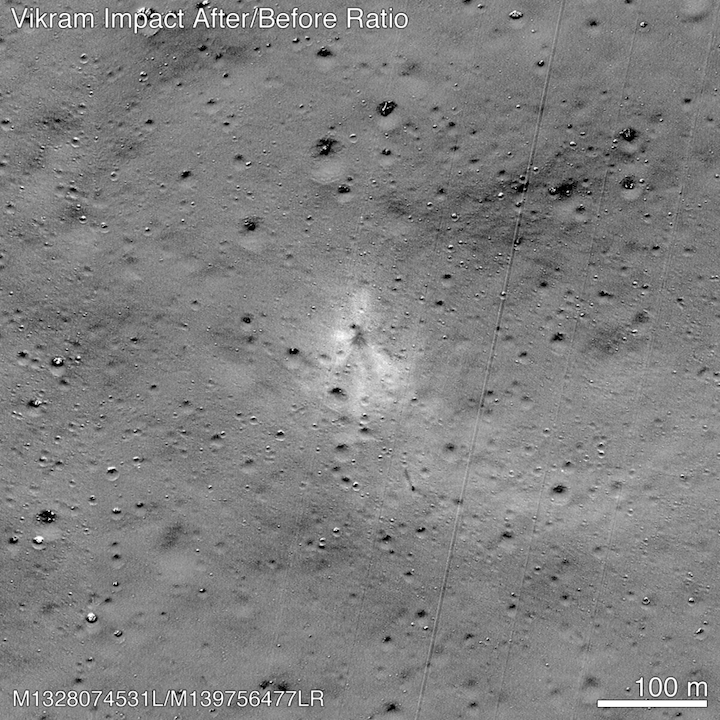
This before and after image ratio highlights changes to the surface; the impact point is near center of the image and stands out due the dark rays and bright outer halo. Note the dark streak and debris about 100 meters to the SSE of the impact point. Diagonal straight lines are uncorrected background artifacts.
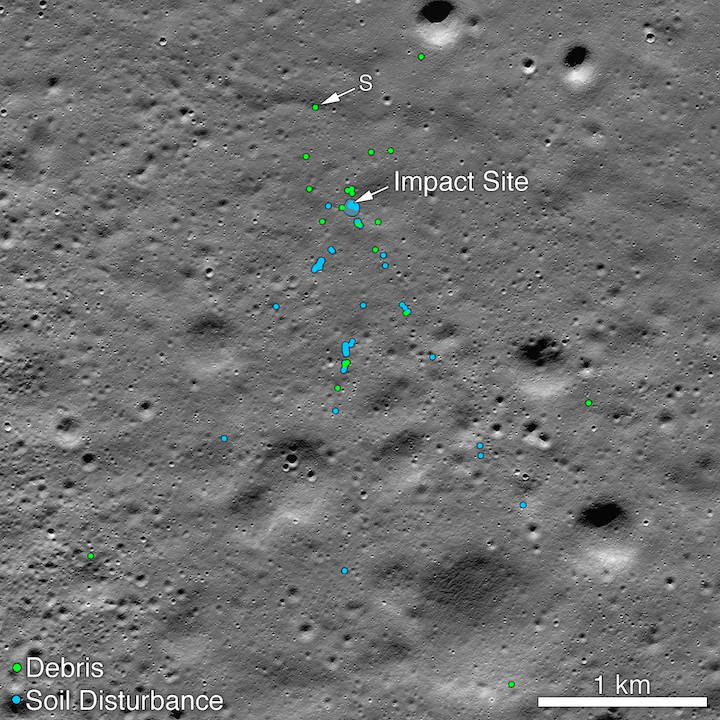
This image shows the Vikram Lander impact point and associated debris field. Green dots indicate spacecraft debris (confirmed or likely). Blue dots locate disturbed soil, likely where small bits of the spacecraft churned up the regolith. "S" indicates debris identified by Shanmuga Subramanian. This portion of the Narrow Angle Camera mosaic was made from images M1328074531L/R and M1328081572L/R acquired Nov. 11.
The Chandrayaan 2 Vikram lander was targeted for a highland smooth plain about 600 kilometers from the south pole; unfortunately the Indian Space Research Organisation (ISRO) lost contact with their lander shortly before the scheduled touchdown (Sept. 7 in India, Sept. 6 in the United States). Despite the loss, getting that close to the surface was an amazing achievement.
The Lunar Reconnaissance Orbiter Camera team released the first mosaic (acquired Sept. 17) of the site on Sept. 26 and many people have downloaded the mosaic to search for signs of Vikram. Shanmuga Subramanian contacted the LRO project with a positive identification of debris.
After receiving this tip, the LROC team confirmed the identification by comparing before and after images. When the images for the first mosaic were acquired the impact point was poorly illuminated and thus not easily identifiable.
Two subsequent image sequences were acquired on Oct. 14 and 15, and Nov. 11. The LROC team scoured the surrounding area in these new mosaics and found the impact site (70.8810S, 22.7840E, 834 m elevation) and associated debris field. The November mosaic had the best pixel scale (0.7 meter) and lighting conditions (72 incidence angle).
The debris first located by Shanmuga is about 750 meters northwest of the main crash site and was a single bright pixel identification in that first mosaic (1.3 meter pixels, 84 incidence angle). The November mosaic shows best the impact crater, ray and extensive debris field. The three largest pieces of debris are each about 2x2 pixels and cast a one pixel shadow.
Quelle: SD
+++
Vikram Lander Found
This image shows the Vikram Lander impact point and associated debris field. Green dots indicate spacecraft debris (confirmed or likely). Blue dots locate disturbed soil, likely where small bits of the spacecraft churned up the regolith. "S" indicates debris identified by Shanmuga Subramanian. This portion of the Narrow Angle Camera mosaic was made from images M1328074531L/R and M1328081572L/R acquired Nov. 11.
Credits: NASA/Goddard/Arizona State University.
The Chandrayaan 2 Vikram lander was targeted for a highland smooth plain about 600 kilometers from the south pole; unfortunately the Indian Space Research Organisation (ISRO) lost contact with their lander shortly before the scheduled touchdown (Sept. 7 in India, Sept. 6 in the United States). Despite the loss, getting that close to the surface was an amazing achievement. The Lunar Reconnaissance Orbiter Camera team released the first mosaic (acquired Sept. 17) of the site on Sept. 26 and many people have downloaded the mosaic to search for signs of Vikram. Shanmuga Subramanian contacted the LRO project with a positive identification of debris. After receiving this tip, the LROC team confirmed the identification by comparing before and after images. When the images for the first mosaic were acquired the impact point was poorly illuminated and thus not easily identifiable. Two subsequent image sequences were acquired on Oct. 14 and 15, and Nov. 11. The LROC team scoured the surrounding area in these new mosaics and found the impact site (70.8810°S, 22.7840°E, 834 m elevation) and associated debris field. The November mosaic had the best pixel scale (0.7 meter) and lighting conditions (72° incidence angle).
The debris first located by Shanmuga is about 750 meters northwest of the main crash site and was a single bright pixel identification in that first mosaic (1.3 meter pixels, 84° incidence angle). The November mosaic shows best the impact crater, ray and extensive debris field. The three largest pieces of debris are each about 2x2 pixels and cast a one pixel shadow.
Quelle: NASA