
27.12.2019

Over the past 60 years, NASA has explored the solar system from the sun to the Kuiper belt. While many of these missions, especially those beyond Saturn, have been one-shot flybys (such as the Voyagers and recently New Horizons), others have charted many of the moons of Jupiter and Saturn extensively by repeated orbital passes. The sole landing on these icy worlds was the Huygens probe, which parachuted to the surface of Saturn’s moon Titan in early 2005 as part of NASA’s Cassini mission, and which operated for about 90 minutes after touchdown.
The data gathered from a few of these moons has provided compelling evidence of possible warm oceans beneath their frozen surfaces, Saturn’s Enceladus and Jupiter’s Europa in particular. NASA would like to explore these subsurface seas, as they appear to offer promise for the potential of life. Between their internal geological activity, spurred by the torturous gravitational complexities of Jupiter and Saturn’s many moons that heats these cold worlds, and the watery plumes spouting from both, they are very compelling to planetary scientists (especially exobiologists).

There are a variety of missions under consideration for these moons, the most immediate of which is the Europa Clipper, currently slated for launch in 2025. But this mission, to be managed by NASA’s Jet Propulsion Laboratory (JPL) and Johns Hopkins University, is another orbiter, and will not be sporting a lander. However, actually getting down and searching the interior oceans of these moons directly is far trickier.
Most current plans call for one of two approaches to learn more about the water within the moon. The first is by either sampling the geyser-like plumes that erupt from fissures and cracks on these moons, as the Europa Clipper will do, while the second involves landing on their icy surfaces and taking small samples aboard the lander for analysis. The latter approach of landing there presents much greater challenges than an orbiter collecting water from a plume.
More challenging still, however, would be the direct exploration of the oceans themselves. JPL is working on a variety of approaches to accomplish this. All of them hold some promise, but require a way to get through the ice to the water below. A number of technologies are being considered for this role, including exotic nuclear-powered “melters,” but they have their work cut out for them. Europa’s ice shell is thought to be as much as 10 to 30 kilometers thick, and Enceladus’ between 30 and 40 kilometers thick, so reaching the ocean below will likely be difficult.
One alternate possibility is to let nature do most of the work, by using the fissures that already allow bits of the ocean to escape via plumes. A few designs are being investigated, but when one is sending a small probe down a hole tens of miles deep, simplicity and flexibility are important assets. Once you do reach that warm ocean, reliability and autonomy will be critical.
Andrew Klesh, who recently oversaw the MARCo cubesat program (the two tiny probes that flew to Mars with the InSight lander, providing a radio link during the landing process), has been working on a project that combines both simplicity and flexibility to design “buoyant rovers.” The rover is called BRUIE, for Bouyant Rover for Under-Ice Exploration, and is specifically designed to not only work while submerged, but also to do so with a high degree of autonomy. “To get under the surface of Europa or Enceladus, we need to find the quickest way in,” says Klesh. He’s currently looking for ways to use natural points-of-entry to sub-ice oceans.
BRUIE is a submersible that is being tested on Earth where it has been autonomously probing underwater ice caves in Alaska with scanning LIDAR and visual imagery to prepare for more complex exploration of the gas giant moons. These test runs have taken place in watery holes called moulins—labyrinthine melt paths that can extend thousands of feet through glaciers into sub-ice ocean water. Melted water at the surface of the glacier is warmer than the ice and melts into it, carving different formations. Some melts all the way through the glacier, creating a network of underwater passages.
This is one thing that makes BRUIE special. Rather than using a brute-force method to punch through a miles-thick ice shell, an evolution of this technology could navigate natural fissures that lead to the warm seas below. It might even use the channels marked by the plumes seen on Enceladus and Europa. As Klesh asks: “Can we map and navigate these subglacial lakes with robots? Are there accessible passageways hidden just beneath the surface?”
The BRUIE test robots are built with both commercially available components and custom 3D-printed parts, allowing for rapid-prototyping and quick revisions. Once the early prototypes were complete, Klesh and his colleagues took them to the Matanuska Glacier in Alaska for early tests. The robots were lowered into the frigid channels, allowing them to sink using controllable buoyancy while being maneuvered by small thrusters. While designed to operate autonomously when possible, they were tethered to a surface control unit from which they could be manually navigated, and recorded detailed measurements and data as they traversed the ice tunnels. This allowed Klesh and his colleagues to map these complex passageways with a compact LIDAR unit as they twisted and turned through the mass of the glacier.

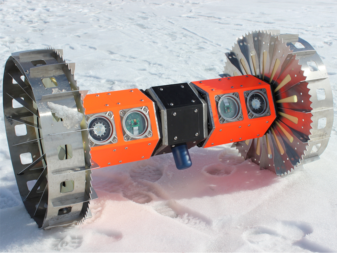
A second robotic design has been developed by Klesh’s team to explore the bodies of water beyond the channel through the ice. It is a buoyant threewheeled rover designed to operate completely autonomously that looks like a small paddle-wheeled tricycle. When dropped through a hole in the ice (in this case, sawed by Klesh and his colleagues), it actually drives along the underside of the ice sheet, like an inverted Mars rover, recording visual and other data as it goes.
Some of these field tests were controlled using a tether, with Klesh and others operating joystick control units, while others were autonomous. Still others were controlled remotely from JPL in Pasadena, California. “This was the first time an under-ice vehicle had been operated via satellite,” Klesh said—the scientists were actually using a satellite to control the rover, adding more offplanet fidelity to the testing.
Current iterations of BRUIE can be operated at depths beyond 200 meters, and with ever-increasing autonomy. Work remains to improve autonomous operation and resistance to the extreme cold and high radiation found in the outer solar system. But early experiments such as BRUIE are critical to developing, testing and improving such technologies.
“A lot of what we do in deep space is applicable to the ocean,” Klesh said. “This is an early prototype for vehicles that could one day go to Europa and other planetary bodies with a liquid ocean covered by ice. It’s ideal for traveling under the ice shelf of an icy world.”
Quelle: SN