
.

Columbus ist nicht nur innen vollgepackt mit den verschiedensten Elementen, auch auf der Aussenseite des europäischen Weltraumlabors wird Wissenschaft betrieben. Neben verschiedenen Antennen war es insbesondere bisher das Sonnenobservatorium SOLAR, das über eine bewegliche Aufhängung die Bahn der Sonne über den Himmel verfolgt und das Spektrum unseres "Sterns" aufnimmt.
Am Mittwoch, den 30.4.2014 kam ein weiteres Instrument dazu: HDEV (High Definition Earth Viewing) ist ein Paket aus vier kommerziellen Videokameras, die auf die Erde gerichtet sind und hochauflösende Bilder aus dem Weltraum liefern - Columbus "sieht" jetzt, wo es lang fliegt...
Bislang wurden Experimente an der Außenhülle von Columbus immer in aufwändigen Außenbordeinsätzen, so genannten EVAs (Extravehicular Activity), der Astronauten installiert: SOLAR, EuTEF (European Technology Exposure Facility), das amerikanische MISSE-6 (Materials International Space Station Experiment), unsere verschiedenen Antennenanlagen, die Amateurfunkkontakte erlauben und Schiffe in den Weltmeeren kartieren. Die Astronauten mussten sich in ihre Raumanzüge zwängen und die ISS verlassen - viele Tage Training, viel Vorbereitung und mehr als zwei ganze Tage der kostbaren Crewzeit mussten dafür geopfert werden. Freilich hat ein EVA den Astronauten auch ein unvergessliches Erlebnis bereitet.
Beim Anbringen von HDEV auf der Columbus External Payload Facility (EPF) wurde auf menschliche Hilfe verzichtet: Der kanadische Roboterarm der Raumstation hat am Mittwoch behutsam die Plattform aus dem "Kofferraum" des unbemannten Dragon-Versorgungsraumschiffs herausgehoben, Richtung Columbus geschwenkt und dort montiert.
.

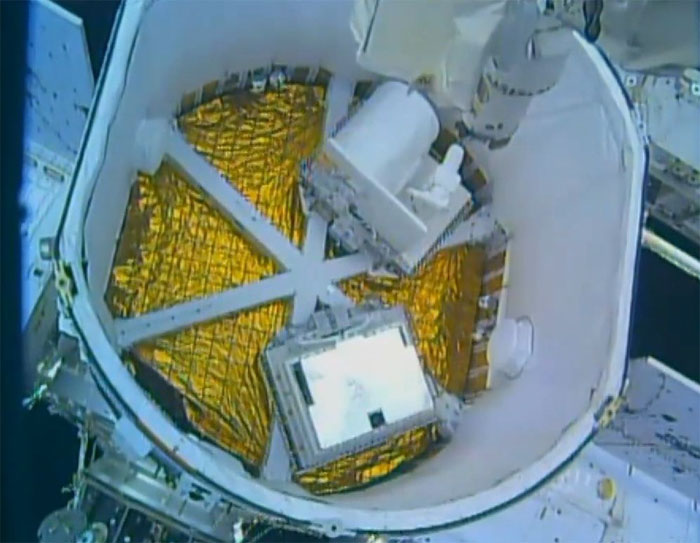
Bild Oben: Vor der Erde sind Columbus (links unten), die Dragon-Kapsel (weißer Konus), und der Roboterarm "Canadarm 2" mit Dextre zu sehen, letzterer macht sich gerade an der External Payload Facility zu schaffen.
Bild Unten: HDEV (unten) wurde als erstes aus dem "Kofferraum" von Dragon herausbugsiert, OPALS wird in einigen Tagen folgen.
Bilder: NASA
.

"Dextre" betrachtet nach getaner Arbeit sein Werk. Bild: NASA
.
Alles wurde vom Boden aus gesteuert - von Houston, dem Kontrollzentrum in Saint-Hubert/Quebec und von uns! Wobei sich unser Anteil auf die Anschaltprozedur des Experiments beschränkte, beim Robotermanöver konnten wir den amerikanischen und kanadischen Kollegen nur bewundernd zusehen.
Die Roboter stehen gerade hoch im Kurs: Ein paar Tage zuvor hatte "Canadarm 2" das Versorgungsraumschiff "eingefangen": Das Konzept von Dragon sieht kein selbstständiges Andocken vor, sondern ein Annähern an die ISS bis auf wenige Meter, dann wird der Roboterarm aktiv, greift das Raumschiff und schwenkt es zu seinem Bestimmungsort an der Raumstation. Für die Installation von HDEV war noch mehr "Fingerspitzengefühl" notwendig, deswegen wurde der "Canadarm 2" um eine komplexe "Hand" ergänzt: Der Roboterarm griff sich den Special Purpose Dexterous Manipulator (SPDM), auch "Dextre" genannt - seinerseits ein eigenständiger Roboter, welcher dann wiederum HDEV heraushob und an Columbus installierte.
Mit HDEV gibt es jetzt endlich auch einen Livestream mit atemberaubenden Videoansichten unserer Erde aus dem All: Unter www.ustream.tv/channel/iss-hdev-payload kann jeder den Flug von Columbus mitverfolgen.
Quelle: DLR
5895 Views