
2.09.2019
The Search for Life
Is (or was) there life beyond Earth? The answer to this question leads underground on planetary bodies in our solar system. Planetary subsurface voids are one of the most likely places to find signs of life (both extinct and extant). Subsurface voids are also one of the main candidates for future human habitat for colonization beyond Earth. To this end, TEAM CoSTAR is participating in the DARPA Subterranean Challenge to develop fully autonomous systems to explore subsurface voids with a dual focus on planetary exploration and terrestrial applications in search and rescue, mining industry, and AI/Autonomy in extreme environments.
SubT Challenge
The DARPA Subterranean or “SubT” Challenge is a robotic competition that seeks novel approaches to rapidly map, navigate, and search underground environments. The competition spans a period of three years. CoSTAR is a DARPA-funded team participating in the systems track developing and implementing physical systems that will be tasked with the traversal, mapping, and search in various subterranean environments: including natural caves, mines, and urban underground.
CoSTAR Technologies
TEAM CoSTAR [Collaborative SubTerranean Autonomous Resilient Robots] is a collaboration between NASA’s JPL, MIT, Caltech, KAIST, LTU and several industry partners (see below). TEAM CoSTAR with more than 60 key members aims at revolutionizing how we operate in the underground domains and subsurface voids for both terrestrial and planetary applications. Specifically, TEAM CoSTAR develops next generation capabilities on several fronts pertaining to efficient exploration of extreme terrains:
- Verifiable autonomy: CoSTAR develops an autonomy architecture that in the top layer translates the mission specifications into single- or multi-robot behaviors using verifiable formal methods. In the lower layer, it translates behaviors to motions by taking the control, sensing, and environment uncertainties into account.
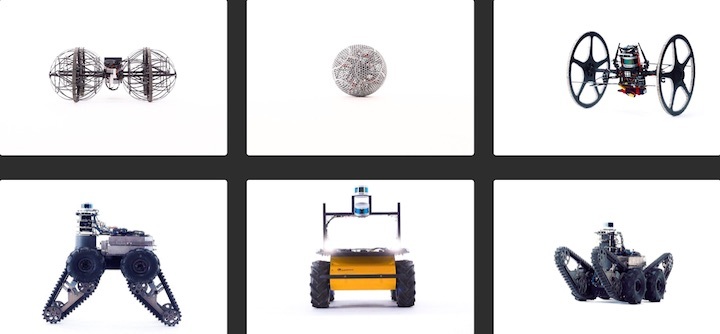
- Next generation mobility systems for extreme terrains: CoSTAR develops energy-efficient and autonomous multi-modal mobility (flying/rolling/bouncing) platforms Resilient drift-catching localization: CoSTAR develops on outlier-tolerant fusion of onboard sensors such as vision, IMU, lidar, with external magneto-quasi static technology for robust localization in dark in km-deep caves with less than 1 kg platforms.
- Multi-robot dense mapping: CoSTAR develops distributed algorithms with confidence-rich mapping to provide precise topological and geometrical maps of the large cave and mine networks.
- Disruption tolerant mesh communication: CoSTAR extends disruption tolerant communication (DTN) to enable a self-healing coordination of a robot swarm with lightweight communication nodes.
- Autonomous skill learning: CoSTAR applies and extends machine learning methods to enable fast safe robot motions in perceptually-degraded environments.
Quelle: NASA