
26.02.2024
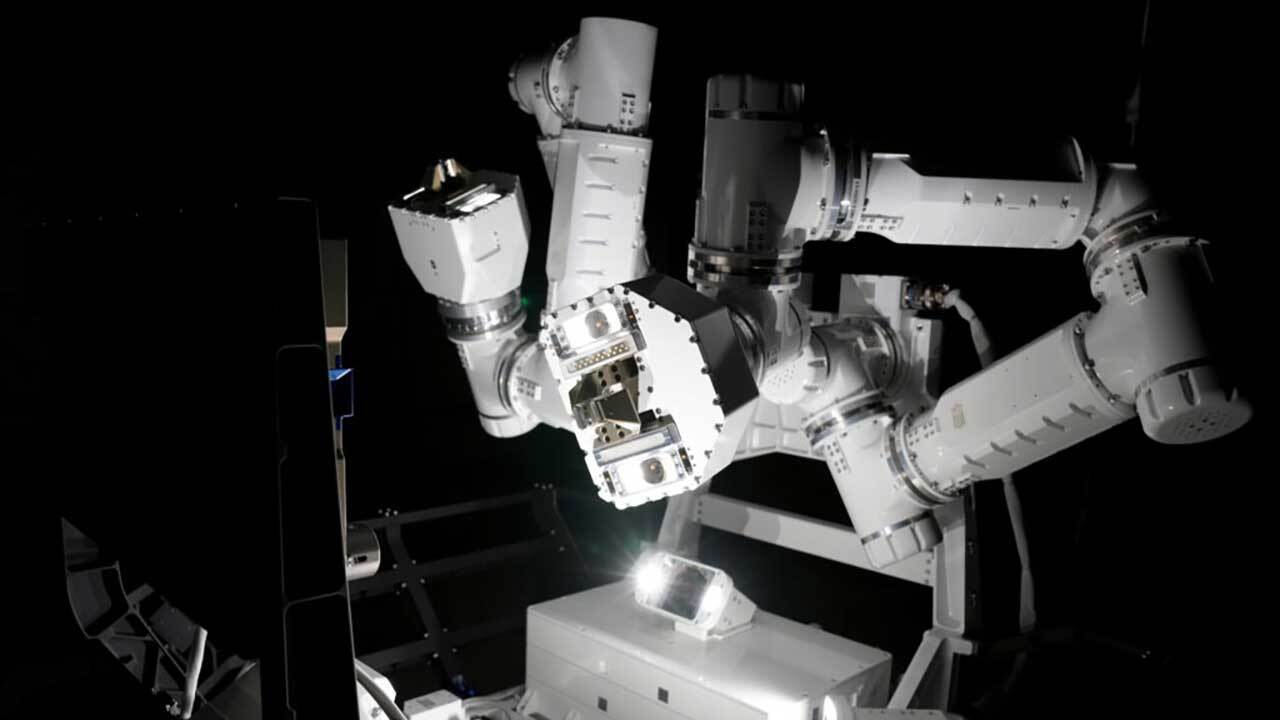
GITAI's S2 robotic arm system will conduct an external demonstration of in-space servicing, assembly, and manufacturing (ISAM) onboard the ISS.
MEDIA CREDIT: Image courtesy of GITAI/NASA
California-based startup GITAI is gearing up to test a novel autonomous robotic arm system on the exterior of the International Space Station (ISS). Called S2, the 1.5-meter (4.9-foot) long pair of mechanical arms launched to the orbiting laboratory in January as part of an ISS National Laboratory®-sponsored technology development project on Northrop Grumman’s 20th Commercial Resupply Services (NG-20) mission.
S2 is designed to carry out a variety of tasks, including in-space servicing, assembly, and manufacturing (ISAM) in the space environment. As part of a months-long series of demonstrations, the arms will be attached to the outside of the space station via a commercial airlock, which was designed and built by Nanoracks, part of Voyager Space’s Exploration Segment.
Launched to the space station in 2020, the Nanoracks airlock is expected to increase capabilities for space-based research and technology development (R&D) as well as station operations by serving as a module to transfer payloads between the interior and the exterior of the orbiting laboratory. Following successful tests on Earth, GITAI is now hoping to put S2 through its paces in space as a way to prove the robotic system is capable and durable enough for use on future missions in low Earth orbit and beyond.

GITAI’s S2 dual-armed robot system will conduct various tasks at the International Space Station.
MEDIA CREDIT: Image courtesy of GITAI
“We’re grateful to have the opportunity to work again with the ISS National Lab and Nanoracks on our second mission onboard the space station to demonstrate the core robotics technology utilized in our Inchworm Robot and Lunar Rover product lines,” said Sho Nakanose, founder and CEO of GITAI. “The success of this extravehicular ISS demo will confirm the feasibility of our technology as a fully operational system in space, achieving technology readiness level (TRL) 7, which will enable GITAI to offer government and commercial customers in-space servicing, assembly, and manufacturing services.”
The space station already relies on another pair of robotic arms—the European Robotic Arm and the Canadarm2. One is primarily used for transporting payloads, and sometimes spacewalking astronauts, from one part of the station to another, while the other has been moving equipment and servicing instruments onboard the space station for more than two decades.
S2 will now join the robotic ranks on station as GITAI’s second technology demonstration in space. Its first iteration, called S1, launched in 2021 and performed multiple common crew activities that were related to robotic intravehicular activity and in-space assembly.
“This technology provides us with the capacity to do additional work in harsher environments that we don’t necessarily want to expose the crew to,” said Mary Murphy, director of programs at Nanoracks. “So, if we had something that we wanted to take care of outside of the space station or a future habitat, we could leverage this robotic system to do that work for us.”
According to Murphy, GITAI’s next mission will step up the complexity from its previous mission. With a goal of one day significantly reducing in-space labor costs and making tasks safer for astronauts, teams will test the robotic arms’ ability to switch out between tools, enabling it to use screwdriver analogs and other similar tools.
More than 20 ISS National Lab-sponsored payloads launched on the NG-20 mission from Cape Canaveral Space Force Station on January 30 at 12:07 p.m. EST. To learn about all the ISS National Lab-sponsored research on this mission, please visit our launch page.
Quelle: International Space Station (ISS) National Laboratory