
.
FT-Utah
Field Trials Utah mit dem TransTerrA System

Das Vorhaben FT-Utah befasst sich mit der Erprobung von robotischen Systemen für den Einsatz im Bereich der planetaren Exploration. Im Rahmen des Vorhabens wurde im Oktober und November 2016 eine vierwöchige Feldtestkampange in der Wüste Utahs, USA, durchgeführt. Hierbei wurden die Systeme in intensiven Versuchen in natürlichem, unstrukturiertem und Mars ähnlichem Gelände zu erprobt und von Bremen aus über mehr als 8300 km Distanz überwacht und kommandiert.
| Laufzeit: | 01.06.2016 bis 31.03.2017 |
| Zuwendungsempfänger: | DFKI GmbH & Universität Bremen |
| Fördergeber: | Bundesministerium für Wirtschaft und Technologie Deutsches Zentrum für Luft- und Raumfahrt e.V. |
| Förderkennzeichen: | Gefördert von der Raumfahrt-Agentur des Deutschen Zentrums für Luft- und Raumfahrt e.V. mit Mitteln des Bundesministeriums für Wirtschaft und Technologie aufgrund eines Beschlusses des Deutschen Bundestages unter dem Förderkennzeichen 50 RA 1621 und 50RA1622 (Universität Bremen). |
| Webseite: | https://twitter.com/ft_utah |
| Anwendungsfelder: | Weltraumrobotik |
| Verwandte Projekte: | TransTerrA
Semi-autonome kooperative Exploration planetarer Oberflächen mit Errichtung einer logistischen Kette sowie Betrachtung terrestrischer Anwendbarkeit einzelner Aspekte (05.2013- 12.2017)
|
| Verwandte Robotersysteme: | SherpaTT
|
| Verwandte Software: | NDLCom
Node Level Data Link Communication
|
Projektdetails




- SherpaTT: Ein hybrider Schreit-Fahrrover mit aktivem Fahrwerk
- Coyote III: Ein Mikro-Rover für unstrukturiertes Gelände
- BaseCamp und Payload-Items: Modulare Knoten-punktstation und Nutzlastkontainer
- Mobiler Leitstand als Missionskontrollstation vor Ort
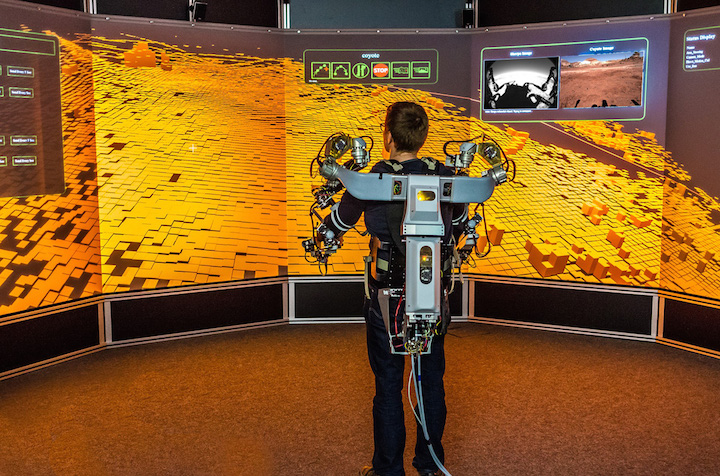
- Bodenstation mit Exoskelett in Bremen, Deutschland, zur entfernten Missionskontrolle
Im Rahmen der Feldtestkampagne wurden die Systeme auf drei unterschiedlichen Ebenen erprobt: (i) Einzelsystemtests hinsichtlich Lokomotion in unstrukturiertem Gelände, (ii) Einzelsystemtests hinsichtlich Autonomie und (iii) Gesamtsystemtest in einer simulierten kooperativen Probenrückholmission. Hierbei stand die Durchführung der (teil-) autonomen Missionssequenz unter Einbindung aller beteiligten Robotersysteme und der Kontrollstation in Bremen im Vordergrund.
Im Feldversuch wurde eine semi-autonome kooperative Exploration planetarer Oberflächen mit Errichtung einer logistischen Kette im Rahmen einer Sample-Return Mission erfolgreich demonstriert.
SherpaTT fungierte in dem Szenario als Explorations- und Probenahmerover, während Coyote III die Rolle eines Shuttles übernahm, welches die entnommenen Proben einsammelt und zur Rückkehrstation zurückführt. Die Durchführung und Kontrolle der Missionssequenz erfolgte per Satellitenlink aus der in Bremen, Deutschland, errichteten Kontrollstation. Hier wurde ein Virtual Reality Lab zur Darstellung der Missionsparameter verwendet, während die Mehrrobotermissionssteuerung durch einen Operator mittels eines Exoskeletts erfolgte.
Neben der Erprobung einer geschlossenen Missionssequenz wurden außerdem die Performanceparameter der Einzelsysteme im Referenzgelände getestet. Weiterhin konnten Teilaspekte der autonomen Exploration erprobt werden, welche sich sowohl auf die Einzelsysteme beziehen, aber auch im Mehrroboterteam durchgeführt wurden.
Die Ergebnisse der Feldtestkampange fließen unter anderem in das Vorhaben TransTerrA ein, in dem neben der extraterrestrischen Exploration auch der Transfer der entwickelten Technologie für terrestrische Anwendungen untersucht wird.
Videos
Field Trials Utah: Roboter-Team simuliert Marsmission in Utah
Eine karge, felsige Wüstenlandschaft und keine Menschenseele weit und breit – um den unwirtlichen Bedingungen auf dem Roten Planeten möglichst nahe zu kommen, testeten Wissenschaftler des Robotics Innovation Center des Deutschen Forschungszentrums für Künstliche Intelligenz (DFKI) vom 24. Oktober bis 18. November 2016 die Kooperation verschiedener Robotersysteme in der Halbwüste des amerikanischen Bundesstaates Utah.
SherpaTT in Außentests
SherpaTT zeigt seine Fähigkeit mittels aktiven Fahrwerk auch große Unebenheiten ausgleichen zu können.
Quelle: DFKI