
-
Big Wheels Keep on Rollin'
This image taken by a front Hazard-Avoidance camera on NASA's Curiosity shows track marks from the rover's first Martian drives. The rover's Bradbury Landing site and its first tire marks are seen at center, in the distance, while tracks from the second drive are in the foreground. Mount Sharp is on the horizon, which is curved to due to the camera's fisheye lens.
In Curiosity's second drive, it rotated about 90 degrees, rolled about 16 feet (5 meters), then rotated back about 120 degrees to face roughly the same direction from which it started. The drive placed it over a scour mark called Goulburn, an area of bedrock exposed by thrusters on the rover's sky crane. Scientists will continue their investigations there.
-
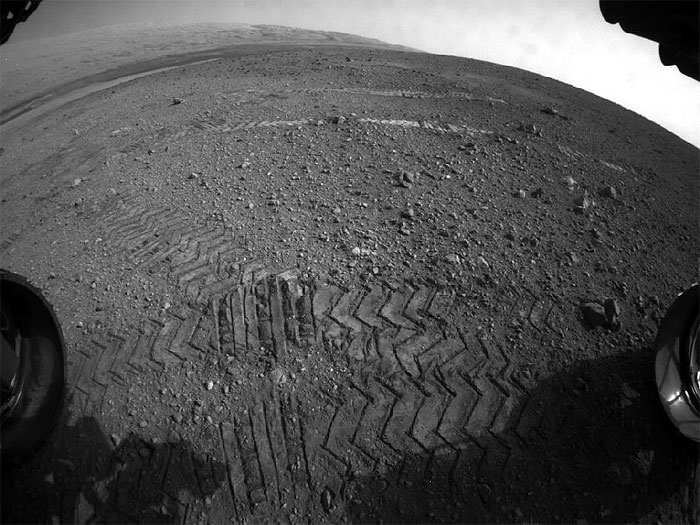
Evidence of Curiosity's Second Drive
This image taken by NASA's Curiosity rover shows track marks from a successful drive to the scour mark known as Goulburn, an area of bedrock exposed by thrusters on the rover's descent stage. The scour mark cannot be seen in this view.
This is a full-resolution image from the rover's Navigation camera. In Curiosity's second drive, it rotated about 90 degrees, drove about 16 feet (5 meters), then rotated back about 120 degrees to face roughly the same direction from which it started.
-

From Infinity and Beyond
The two donut-shaped tracks make an infinity symbol, and mark the first two drives of NASA's Curiosity rover. The landing site is at the far right. Tracks from the first drive on Aug. 22, 2012 lead away from the landing site and include the donut at right. The second donut was made during the rover's second drive on Aug. 27.
The full-resolution images making up this mosaic were taken by the rover's Navigation camera.
-

'Reach for the Stars' Goes Interplanetary
With students and NASA space shuttle astronaut Leland Melvin looking on, musical artist will.i.am posts a tweet soon after his song "Reach for the Stars" was beamed back from the Curiosity Mars rover and broadcast to a live audience at NASA's Jet Propulsion Laboratory in Pasadena, Calif.
-
Curiosity Tracks Its Tracks
This image shows a close-up of track marks left by NASA's Curiosity rover. Holes in the rover's wheels, seen here in this view, leave imprints in the tracks that can be used to help the rover drive more accurately. The imprint is in fact Morse code for JPL, which is short for NASA's Jet Propulsion Laboratory in Pasadena, Calif., where the rover was built and the mission is managed.
Curiosity's "visual odometry" software measures terrain features -- such as rocks, rock shadows and patterns in the rover tracks -- to determine the precise distance between drive steps. Knowing how far it has traveled is important for measuring any wheel slippage that may have occurred, for instance due to high slopes or sandy ground. Fine-grained terrains generally lack interesting features, so Curiosity can make its own features using its wheel tracks.
The Morse code, imprinted on all six wheels, is: .--- (J), .--. (P), and .-.. (L).
-

Reading the Rover's Tracks
The straight lines in Curiosity's zigzag track marks are Morse code for JPL, which is short for NASA's Jet Propulsion Laboratory in Pasadena, Calif., where the rover was built and the mission is managed. The "footprint" is more than an homage to the rover's builders, however. It is an important reference mark that the rover can use to drive more precisely via a system called visual odometry.
The Morse code, imprinted on all six wheels, is: .--- (J), .--. (P), and .-.. (L), as indicated in this image.
-

Curiosity Leaves Its Mark
This image shows a close-up of track marks from the first test drive of NASA's Curiosity rover. The rover's arm is visible in the foreground. A close inspection of the tracks reveals a unique, repeating pattern: Morse code for JPL. This pattern, visible as straight bands across the zigzag track marks, can be used as a visual reference to help the rover drive accurately.
Curiosity's "visual odometry" software measures terrain features -- such as rocks, rock shadows and patterns in the rover tracks -- to determine the precise distance between drive steps. Knowing how far it has traveled is important for measuring any wheel slippage that may have occurred, for instance due to high slopes or sandy ground. Fine-grained terrains generally lack interesting features, so Curiosity can make its own features using its wheel tracks.
The Morse code, imprinted on all six wheels, is: .--- (J), .--. (P), and .-.. (L). JPL is short for NASA's Jet Propulsion Laboratory in Pasadena, Calif., where the rover was built and the mission is managed.
-

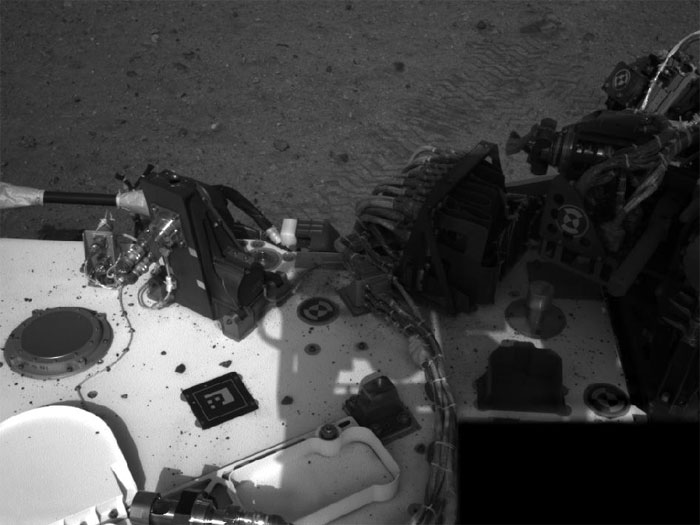
Martian Soil on Curiosity's Wheels After Sol 22 Drive
Soil clinging to the right middle and rear wheels of NASA's Mars rover Curiosity can be seen in this image taken by the Curiosity's Navigation Camera after the rover's third drive on Mars. The drive of about 52 feet (16 meters) during the 22nd Martian day, or sol, of the mission (Aug. 28, 2012), covered more ground than the two previous drives combined.
-

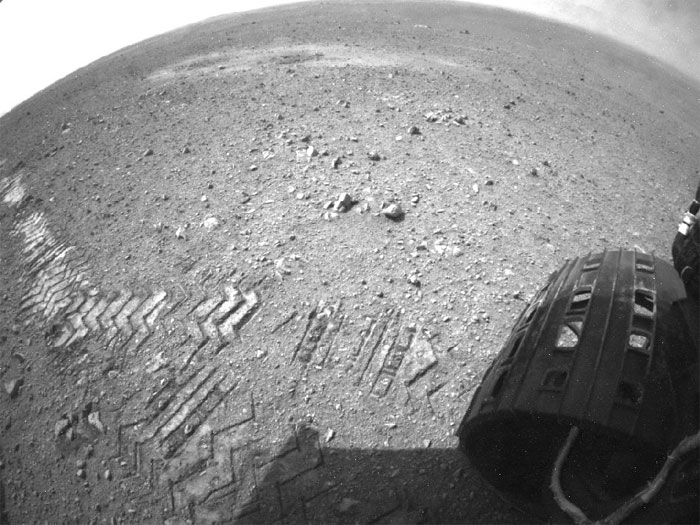
Tracks from Eastbound Drive on Curiosity's Sol 22
On Aug. 28, 2012, during the 22nd Martian day, or sol, after landing on Mars, NASA's Curiosity rover drove about 52 feet (16 meters) eastward, the longest drive of the mission so far. The drive imprinted the wheel tracks visible in this image. The rover's rear Hazard Avoidance Camera (Hazcam) took the image after the drive. Curiosity's front and rear Hazcams have fisheye lenses for enabling the rover to see a wide swath of terrain. This image has been processed to straighten the horizon.
------------------------------------------------------------------------------------
PASADENA, Calif. -- NASA's Mars rover Curiosity has set off from its landing vicinity on a trek to a science destination about a quarter mile (400 meters) away, where it may begin using its drill.
The rover drove eastward about 52 feet (16 meters) on Tuesday, its 22nd Martian day after landing. This third drive was longer than Curiosity's first two drives combined. The previous drives tested the mobility system and positioned the rover to examine an area scoured by exhaust from one of the Mars Science Laboratory spacecraft engines that placed the rover on the ground.
"This drive really begins our journey toward the first major driving destination, Glenelg, and it's nice to see some Martian soil on our wheels," said mission manager Arthur Amador of NASA's Jet Propulsion Laboratory in Pasadena, Calif. "The drive went beautifully, just as our rover planners designed it."
Glenelg is a location where three types of terrain intersect. Curiosity's science team chose it as a likely place to find a first rock target for drilling and analysis.
"We are on our way, though Glenelg is still many weeks away," said Curiosity Project Scientist John Grotzinger of the California Institute of Technology in Pasadena. "We plan to stop for just a day at the location we just reached, but in the next week or so we will make a longer stop."
During the longer stop at a site still to be determined, Curiosity will test its robotic arm and the contact instruments at the end of the arm. At the location reached Tuesday, Curiosity's Mast Camera (Mastcam) will collect a set of images toward the mission's ultimate driving destination, the lower slope of nearby Mount Sharp. A mosaic of images from the current location will be used along with the Mastcam images of the mountain taken at the spot where Curiosity touched down, Bradbury Landing. This stereo pair taken about 33 feet (10 meters) apart will provide three-dimensional information about distant features and possible driving routes.
Curiosity is three weeks into a two-year prime mission on Mars. It will use 10 science instruments to assess whether the selected study area ever has offered environmental conditions favorable for microbial life. JPL, a division of Caltech, manages the mission for NASA's Science Mission Directorate in Washington.
Quelle:NASA