
.
13.11.2014

Rosetta flight control team in the main control room at ESOC on 13 November. Credit: ESA
ROSETTA OPERATIONS UPDATE
A short update from the Rosetta mission team at ESOC, still working today in the Main Control Room. We spoke a few minutes ago with Ignacio Tanco, deputy spacecraft operations manager, who reports that the spacecraft is doing very well, thank you!
Rosetta is operating nominally; the network systems and overall ground segment to control the mission are nominalLast night, Rosetta lost contact with Philae as expected when it orbited below the horizon just after 20:00 CET.Contact was re-established this morning at 06:01 UTC / 07:01 CET, and the Philae-Rosetta radio link was initially unstable.As Rosetta rose higher above the Philae landing site, the link became very stable and the lander could transmit telemetry (status and housekeeping information) and science data from the surface.This morning's surface link was again lost due to Rosetta's orbit at about 09:58 UTC / 10:58 CET. Ignacio explains that with the current orbit, Rosetta will have, typically, two Philae communication windows per day.The next window opens at 19:27 UTC on the spacecraft and runs through to 23:47 UTC spacecraft time.The team are ensuring that Rosetta maintains an orbit that is optimised for lander communication support; they are planning a manoeuvre (thruster burn) today to be conducted on Friday that will help keep Rosetta where it should be. Rosetta already conducted a burn last night as part of this effort.
Rosetta is presently sending signals to the ground stations at about 28 Kbps; Ignacio says that the spacecraft's own telemetry downlink uses about 1 or 2 Kbps of this, so the rest is being used to download science data from Rosetta and lander science and telemetry from the surface.
Rosetta is presently sending signals to the ground stations at about 28 Kbps; Ignacio says that the spacecraft's own telemetry downlink uses about 1 or 2 Kbps of this, so the rest is being used to download science data from Rosetta and lander science and telemetry from the surface.
.
PHILAE, THE ‘HAPPY LANDER’
"Philae is on the surface and doing a marvellous job, working very well and we can say we have a very happy lander," says Paolo Ferri, ESA's Head of Mission Operations at ESOC today.
During the second lander-orbiter communication slot, which ran from 06:01 UTC / 07:01 CET until 09:58 UTC / 10:58 CET this morning, "We had a perfect pass; the radio link was extremely stable and we could download everything according to the nominal plan," adds Rosetta Flight Director Andrea Accomazzo.
.
Credits: ESA/Rosetta/Philae/CIVA
Here are details:
First analysis of the touchdown data suggests that the lander bounced twice before settling on the surface of Comet 67P/C-G. The lander remains unanchored to the surface, but the instruments are running and are delivering images and data.
After touchdown at 15:34 UTC (confirmed at 17:02 CET), a clear strong signal was received, with some breaks. Lander telemetry stabilised at about 17:32 UTC and communication with the surface was maintained until the link to the orbiter was lost at 17:59 UTC due to Rosetta's orbit; this was about an hour earlier than predicted for the target landing site (most likely due to local horizon interference).
Later on 12 November, after analysing lander telemetry, the Lander Control Centre (in Cologne) and Philae Science, Operations and Navigation Centre (SONC, Toulouse) reported;
There were three touchdowns at 15:34, 17:25 and 17:32 UTC; in other words, the lander bounced
The firing of the harpoons did not occur
The primary battery is working properly
The mass memory is working fine (all data acquired until lander loss of signal at 17:59 UTC were transmitted to the orbiter)
Systems on board the lander recorded a rotation of the lander after the first touchdown. This is confirmed by ROMAP instrument data, which recorded a rotation around the Z-axis (vertical).
The lander did receive some power from the solar panels on Wall No. 2 (technical description of the lander's solar walls here), but it appears that parts of the lander were in shadow during the time that last night's surface telemetry were being transmitted.
Teams are still working to confirm the location and the overall power and thermal situation on board. Nonetheless, the lander appears to be performing well.
.
PHILAE’S LANDING THROUGH ROSETTA’S EYE
After Philae separated from its mothership yesterday, the OSIRIS imaging system on Rosetta shot a series of images following the lander's descent to its destination on Comet 67P/Churyumov-Gerasimenko.
Separation occurred onboard the spacecraft at 08:35 GMT (09:35 CET), with the confirmation signal arriving on Earth at 09:03 GMT (10:03 CET).
This is how Philae appeared to Rosetta’s OSIRIS narrow-angle camera a couple of hours after separation, at 10:23 GMT (onboard spacecraft time). This image shows details of the lander, including the deployment of the three legs and of the antennas.
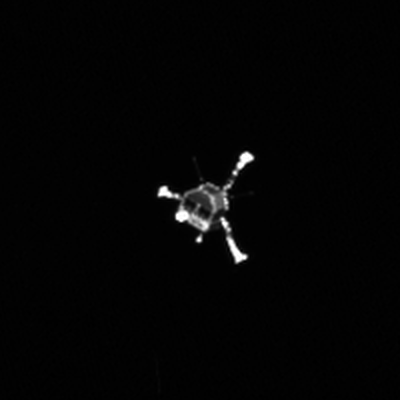
The departure of Philae on 12 November 2014, as seen with OSIRIS NAC on Rosetta at 10:23 GMT (onboard spacecraft time). Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
-----
And here is how the descent proceeded:
.
Series of images form OSIRIS NAC showing Philae's descent to the surface of a comet. They were taken on 12 November 2014, between 10:24 and 14:24 GMT (onboard spacecraft time). Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
.
This series of images showing Philae’s descent to the surface of the comet were taken with the OSIRIS narrow-angle camera between 10:24 and 14:24 GMT (onboard spacecraft time). More images showing Philae closer to the surface are still to be downloaded.
Here is another image, this one taken with the OSIRIS wide-angle camera, which shows the position of Philae (circled) at 14:19:22 GMT (onboard spacecraft time).
.
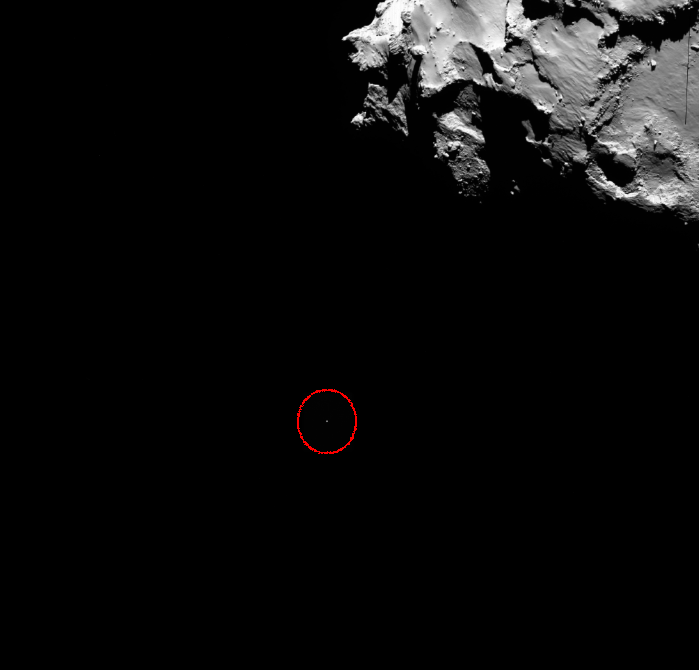
Philae descending to the comet, as seen by OSIRIS WAC on Rosetta, on 12 November 2014 at 14:19:22 GMT (onboard spacecraft time). Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
.
And this is where Philae made its first touchdown on Comet 67P/C-G. It is thought that Philae bounced twice before settling on the surface of the comet, and the location of the first touchdown point is marked in this image from the OSIRIS narrow-angle camera (which was taken from a distance of 50 km on 2 September 2014, prior to landing).
.
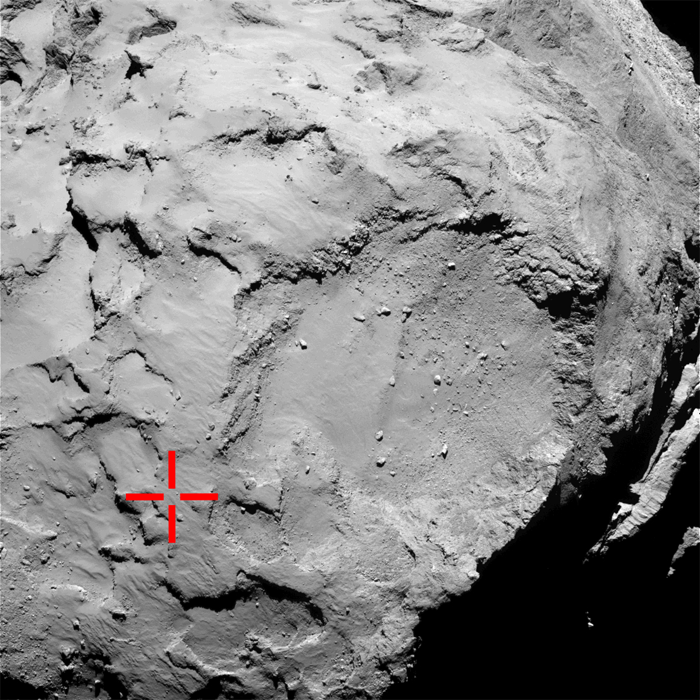
The location of the first touchdown point of the Philae lander on Comet 67P/C-G, marked on an image from Rosetta’s OSIRIS narrow-angle camera taken from a distance of 50 km on 2 September 2014. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
.
Philae's first touchdown point is also marked in this image taken with the OSIRIS narrow-angle from a distance of 30 km on 14 September 2014 (prior to landing).
.
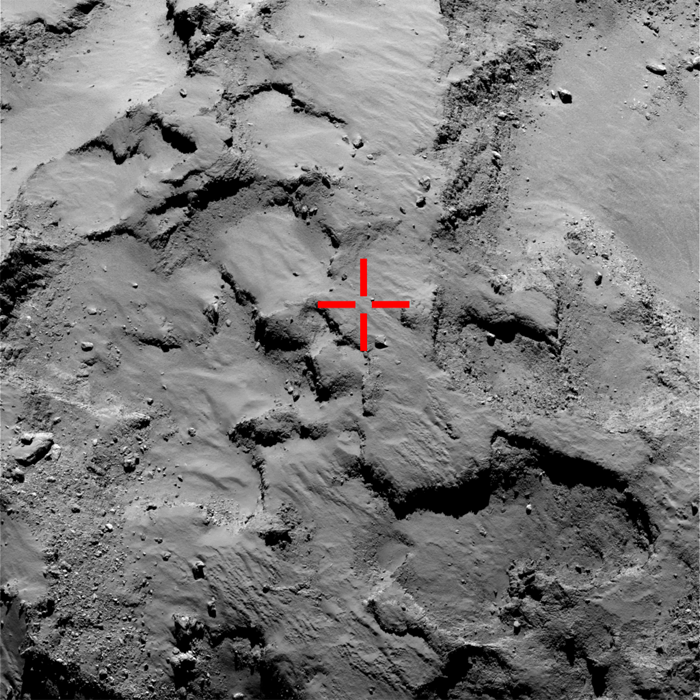
The location of the first touchdown point of the Philae lander on Comet 67P/C-G, marked on an image from Rosetta’s OSIRIS narrow-angle camera taken from a distance of 30 km on 14 September 2014. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
.
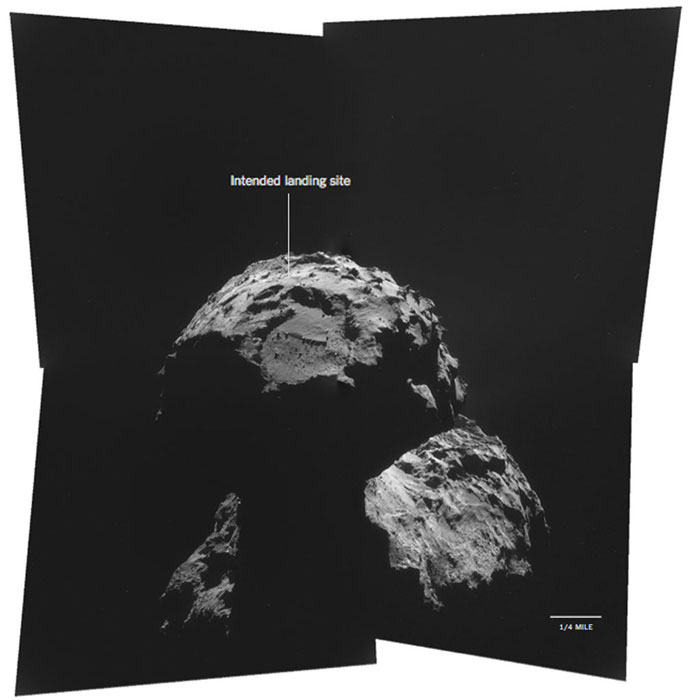
Finally, here is a five-image montage of OSIRIS narrow-angle images that is being used to try to identify the final touchdown point of Rosetta’s lander Philae.
.
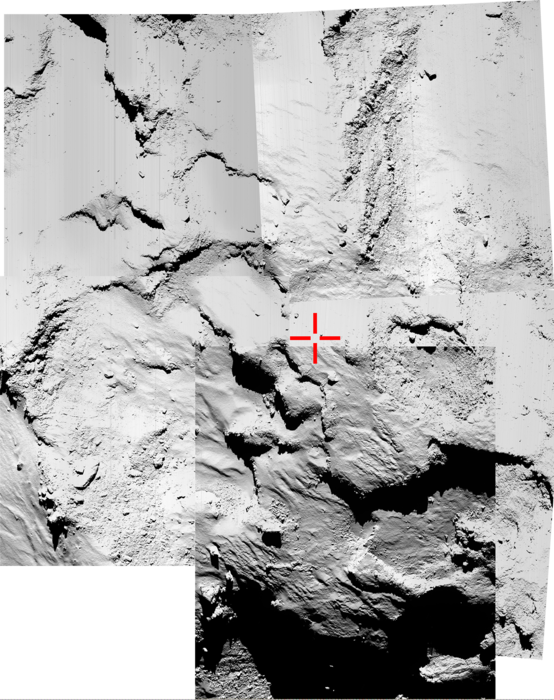
Five-image montage of OSIRIS NAC images taken around the time of landing on 12 November 2014, when Rosetta was about 18 km from the centre of Comet 67P/C-G. Credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
.
These images were taken around the time of landing on 12 November when Rosetta was about 18 km from the centre of the comet (about 16 km from the surface).
The signal confirming the first touchdown arrived on Earth at 16:03 GMT (17:03 CET). It is thought that Philae bounced twice before settling on the surface of the comet. The lander has not yet been identified and images are still to be downloaded from the Rosetta spacecraft for further analysis.
.
40 METRES ABOVE A COMET
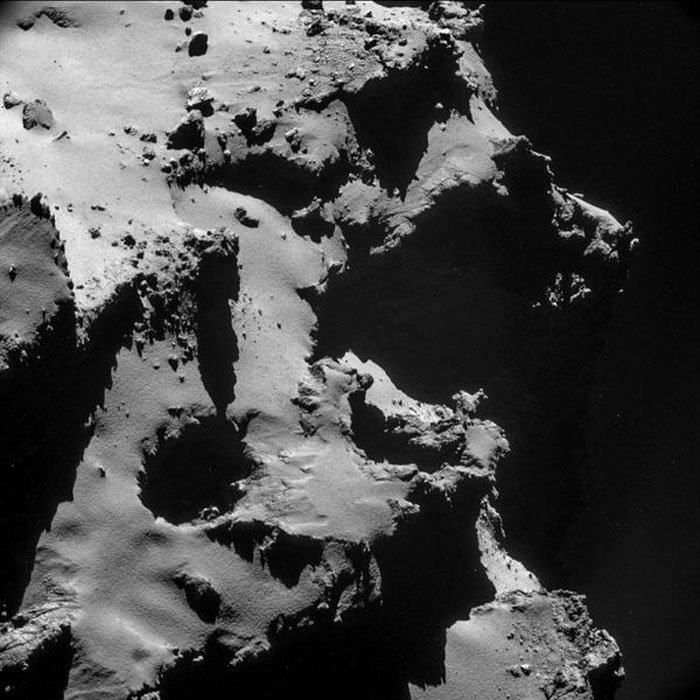
Here is an image that was taken by the ROLIS imager on Rosetta's lander Philae when it was about 40 m above the surface of Comet 67P/Churyumov-Gerasimenko.
The image shows that the surface of the comet is covered by dust and debris ranging from mm to meter sizes. The large block in the top right corner is 5 m in size. In the same corner the structure of the Philae landing is visible.
.

The surface of Comet 67P/C-G from the lander's down-looking descent camera ROLIS. Credit: ESA/Rosetta/Philae/ROLIS/DLR
***
The aim of the ROLIS experiment is to study the texture and microstructure of the comet's surface. ROLIS (ROsetta Lander Imaging System) has been developed by the DLR Institute of Planetary Research, Berlin.
.
COMET WITH A VIEW
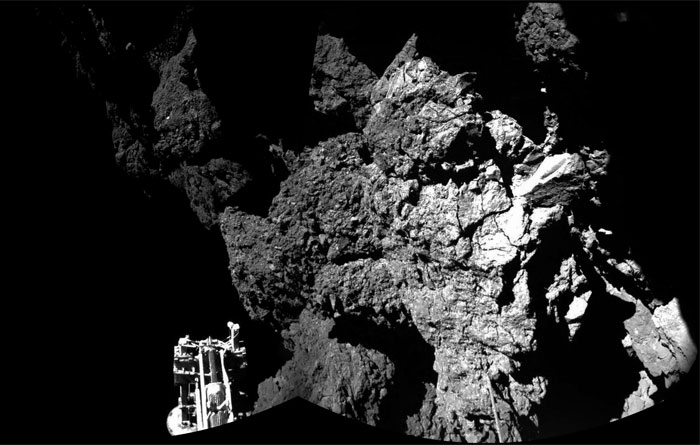
Here is the first panoramic ‘postcard’ from the surface of a comet, returned by Rosetta’s lander Philae, which is currently on the surface of Comet 67P/Churyumov-Gerasimenko:
.
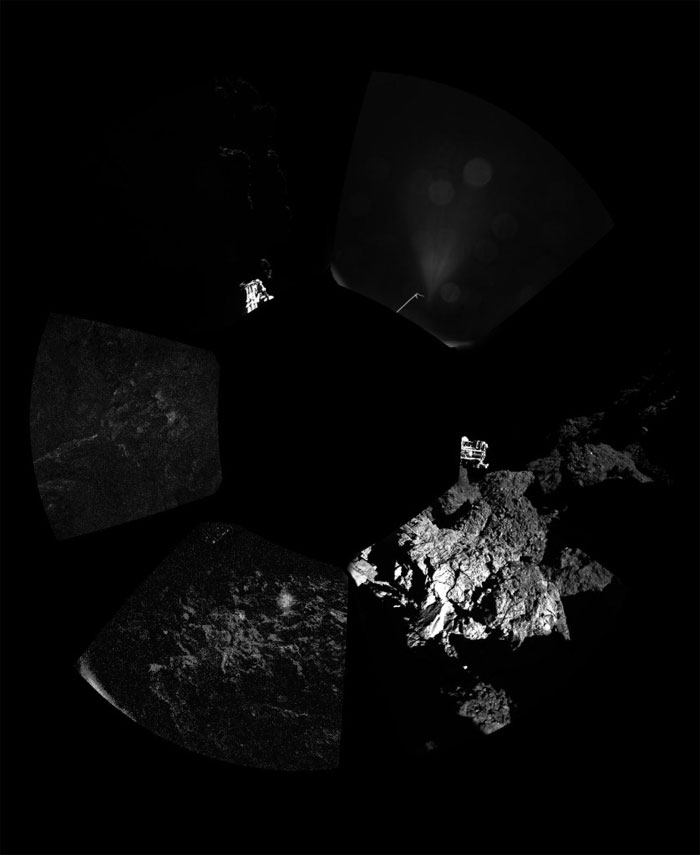
First comet panoramic from the CIVA-P imaging system on Philae. Credits: ESA/Rosetta/Philae/CIVA
This unprocessed view, captured by the CIVA-P imaging system on the lander, shows a 360º view around the point of final touchdown. The three feet of Philae’s landing gear can be seen in some of the frames.
Below is the same image, with superimposed a sketch of the Philae lander in the configuration the lander team currently believe it is in.
.
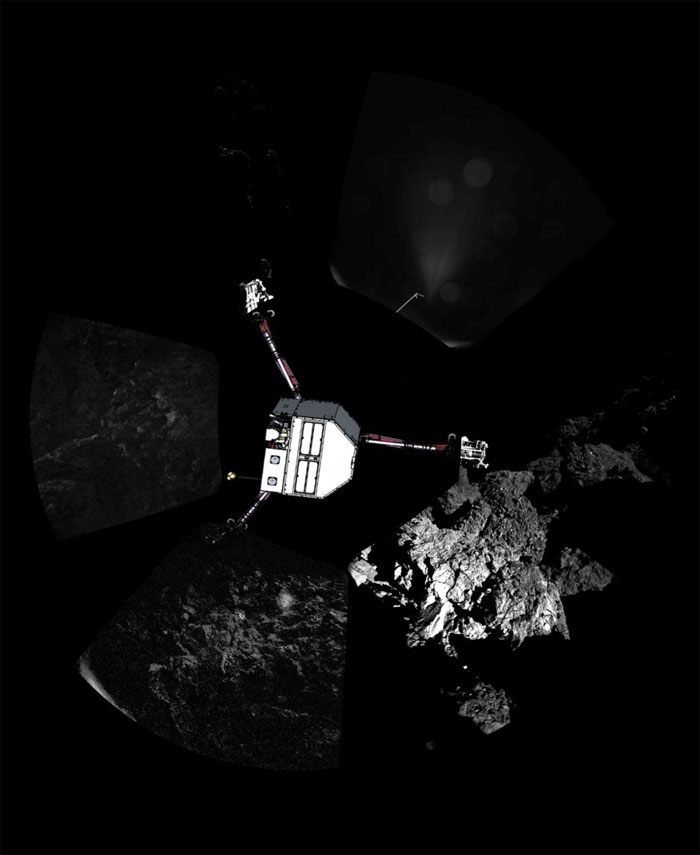
First comet panoramic from the CIVA-P imaging system on Philae, with an indication of the lander orientation superimposed on top of it. Credits: ESA/Rosetta/Philae/CIVA
.
Confirmation of Philae’s touchdown on the surface of Comet 67P/C–G arrived on Earth at 16:03 GMT/17:03 CET on 12 November.
Quelle: ESA
....
Landing on a Comet, a European Space Agency Mission Aims to Unlock the Mysteries of Earth

In a technological feat that gives scientists their first opportunity to dig into a remnant of the early solar system, the European Space Agency’s Rosetta mission successfully placed a small spacecraft on the surface of a speeding comet on Wednesday.
With this achievement, a comet is no longer a mysterious and sometimes frightening spray of light across the night sky, but another member of the solar system to be explored, like the moon and Mars. The technology of landing on a comet, with its wisps of gravity, could be applied to future efforts to mine asteroids.
The agency’s director general, Jean-Jacques Dordain, described the touchdown on Comet 67P/Churyumov-Gerasimenko, a 2.5-mile-wide ball of rock, ice and dust moving faster than 40,000 miles an hour, as “a big step for human civilization.”“Our ambitious Rosetta mission has secured another place in the history books,” Mr. Dordain said at a news conference. “Not only is it the first to rendezvous with and orbit a comet, but it is now also the first to deliver a probe to a comet’s surface.”
For scientists, one of the central mysteries that Rosetta will explore is whether Earth’s oceans are filled with melted comets. Since the rocky bits that came together to form the planet were dry, water has to have come from somewhere else. One possibility is that comets slamming into the Earth early on seeded it with water.
News of the touchdown of the 220-pound lander, named Philae, arrived at the mission control center in Darmstadt, Germany, at 5:03 p.m. local time (11:03 a.m. Eastern time). Cheers erupted.
“We’re there, and Philae is talking to us,” said Stephan Ulamec, the manager for the lander. “We are on the comet.”
With that news, a procession of officials from nations and organizations, including NASA, that had collaborated on the $1.75 billion mission reveled in the accomplishment, capping a 10-year, four-billion-mile trip.
“How audacious!” said James L. Green, the director of NASA’s planetary sciences division. “How exciting! How unbelievable to be able to dare to land on a comet.”
Within the hour, though, a worrisome caveat came to light.
“It’s not only complicated to land there,” Dr. Ulamec said in a later news conference. “It’s also, as it appears, very complicated to understand what has happened.”
.
Two harpoons that should have fired into the comet did not, and the lander may not be secured to the surface. Dr. Ulamec said fluctuations in the radio link and the generation of power by the solar panels suggested that Philae may have bounced off the surface before settling down again.

“Maybe today we didn’t just land once, we even landed twice,” Dr. Ulamec said.
As expected, the Rosetta orbiter moved out of the line of sight of Philae, breaking radio communications.
The orbiter is to re-establish the radio link in the next day, and mission managers hope then to better understand the stability of Philae’s footing.
Nonetheless, the lander and its 10 instruments have begun 64 hours of scientific operations before its batteries drain. Solar panels will recharge the batteries, allowing intermittent operations over the coming months, about an hour every two days.
The landing culminated a tense day as Rosetta maneuvered to the correct position to let Philae go — moments of celebration were interspersed with long, quiet stretches of waiting.
The operation proceeded despite a few small glitches and one potential showstopper problem: failure of a thruster that was to fire after touchdown to press the lander against the comet’s surface. A pin was supposed to break a wax seal on the gas tank, but repeated attempts did not succeed.
Without the thruster, the washing-machine-size Philae would have to rely on ice screws on its landing legs and the harpoons to anchor it to the comet. The thruster, which was to shoot a stream of nitrogen gas, was intended to counteract not just the possibility of Philae bouncing off the surface but also the upward kick from the firing of the harpoons.
Mission managers decided to proceed because there was no way to repair it.
Philae detached on schedule, for a seven-hour descent.
There was some worrying a couple of hours later when the lander was about 10 minutes late in re-establishing communications with the orbiter.
Mission managers could not do anything; the readings they saw on their computer screens reflected what had occurred 28 minutes earlier — the time it took a radio signal to travel the 316 million miles from Rosetta to Earth.
But soon they received photos — a blurry image of Rosetta’s solar array taken by Philae about 50 seconds after separation, and then a sharper image by Rosetta of the descending Philae.
“We see the lander going down on the right track,” said Andrea Accomazzo, the flight director.
.
Then there was more waiting, with amusing updates via the Twitter accounts of Rosetta and Philae. “Finally! I’m stretching my legs after more than 10 years. Landing gear deployed!” read a Twitter posting from Philae.
The web comic XKCD also provided real-time updates, even mentioning the problem with the nitrogen thruster. In the comic, Rosetta told Philae that mission control was worried about the thruster, and the lander responded, “I really hope harpoons work on comets.”
The harpoons turned out to be a valid concern.
“There are some indications that they might not have been fired, which could mean that we are sitting in soft material and we are not anchored,” Dr. Ulamec said. “We have to analyze what is the actual situation.”
The XKCD comic updated: “Do harpoons work on comets? Don’t know.”
For now, Philae is working, and the instruments have already sent back some images and data. But if it is not anchored, Philae may not operate as long as hoped — the original goal was next March — as emissions of dust and gas grow as the comet moves nearer to the sun.
Even if the lander cannot complete the full mission, managers have said, Rosetta will still be a resounding success. Planetary scientists have never looked at a comet so close up for so long.
Comets are frozen leftovers from the formation of the solar system. Rosetta is named after the Rosetta Stone, the engraved block that was crucial in deciphering Egyptian hieroglyphics, and scientists hope the spacecraft’s observations will offer important clues to how the solar system came together 4.5 billion years ago. (Philae was an island, now submerged in Lake Nasser, where an obelisk provided clues to solving the Rosetta Stone.)
Previous missions have zoomed by comets at high speeds, providing only brief examinations. By contrast, Rosetta will be a constant companion as Comet 67P approaches the sun, swings around and heads out again, its instruments potentially providing more than two years of data.
Quelle: TheNewYorkTimes
.
Update: 14.11.2014
.
ROSETTA MISSION: RESULTS FROM COMET LANDING: 14 NOV, 13:00 GMT
Follow our ESA Hangout live today starting at 13:00 GMT / 14:00 CET. Rosetta and Philae teams will provide an update on mission progress.
.Philae Lander @Philae2014 · 39 Min. Vor 39 Minuten
Last night MUPUS hammered the penetrator into the ground. APXS also got to work! My team is currently checking how they did #CometLanding
Philae Lander @Philae2014 · 46 Min. Vor 46 Minuten
Good morning, Earth! It’s been a busy night at #67P! Now that I’m back in touch with my team, I’ll tell you all about it! #CometLanding
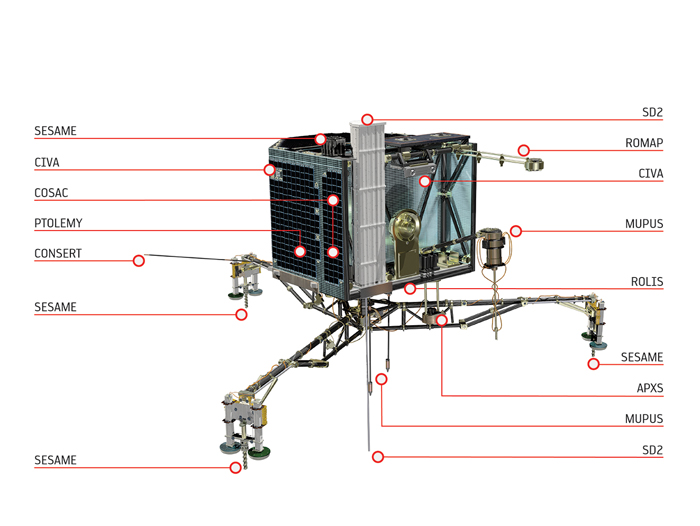
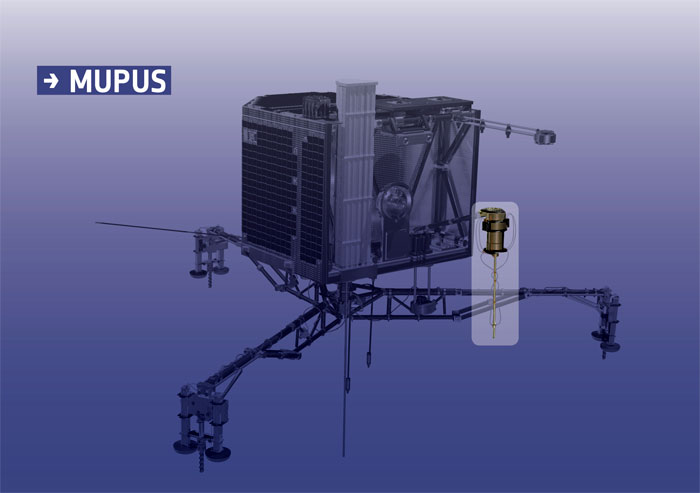
MUPUS
MUPUS (Multi purpose Sensors for Surface and Subsurface Science) is a scientific experiment onboard the Rosetta Lander Philae. The main science goals of MUPUS are:
to determine the thermal and mechanical properties of the outer layers of the comet's nucleus
to determine the energy balance at the comet’s surface and the adjacent boundary layers
to understand mechanisms of cometary activity
to derive the pristineness of the material in the outer layers, in support of cosmochemical observations
To achieve these goals the experiment consists of three different sensors which are controlled by a central electronics unit. The PEN (penetrator) is basically a hollow rod of 35 cm length which will be deployed at a distance of about 1.5 m from the landing module and inserted into the cometary soil by means of an electromagnetic hammering mechanism. During the insertion, progress per stroke is measured to provide data on the mechanical properties of the comet’s surface. Fixed to the inside of the rod are 16 temperature sensors made from Titanium and sputtered on a Kapton foil. These sensors provide a temperature depth profile of the comet’s surface layer as a function of local time and perihelion distance. Furthermore, the sensors can also be used in a heating mode which allows active measurement of the thermal conductivity depth profile. The PEN measurements are supplemented by surface-temperature measurements with the infrared sensor TM (Thermal Mapper) and measurements by temperature sensors inside the two anchoring harpoons of Philae which might penetrate to a depth of 1.5 m into the soil (depending on the soil properties). The TM sensor head is mounted on a strut of the Philae Lander at a height of about 1 m above the surface and measures the emitted thermal radiation from an area of ~1 m2 in 4 wavelength channels between 5 and 25 µm using thermopile detectors. Due to the nearly negligible gravitational force of the comet, anchoring harpoons are required to fix the Lander safely to the ground. Each of the harpoons contains a temperature sensor and an accelerometer, thus they also serve a scientific purpose as part of the MUPUS experiment. During the anchoring process, during which the harpoons are shot into the surface, the deceleration of the harpoons will be measured by the MUPUS accelerometers, providing additional data on the mechanical properties of the landing site down to the final depth of the anchors.
The MUPUS experiment was designed and built by an international consortium under the lead of the Principal Investigator (PI) T. Spohnfrom the Institute for Planetology (IfP) of the University of Münster, with major contributions from IfP (PI, science and management), SRC Warsaw (system and mechanical engineering, PEN hardware, electronics), DLR Berlin (DPU and TM), and IWF Graz (anchor sensors).
The Asteroids and Comets Department has been involved in MUPUS from the start of the project in 1994 with two scientific Co-I’s and the development of the IR sensor head TM. After the MUPUS-PI, T. Spohn, became Director of the DLR Institute for Planetary Research in Berlin in 2004 the project management and operations planning tasks for the whole experiment were transferred to the Asteroids and Comets Department.
Quelle: ESA
...
LIVE /14.15 MEZ
---





...
THREE TOUCHDOWNS FOR ROSETTA’S LANDER
This is an article from ESA's Space Science Portal to summarise Philae's landing so far. For a live summary and latest status update, watch the Google Hangout starting shortly at 13:00 GMT/14:00 CET.
After achieving touchdown on a comet for the first time in history, scientists and engineers are busy analysing this new world and the nature of the landing.
Touchdown was confirmed at ESA’s Space Operations Centre in Darmstadt, Germany at 16:03 GMT/17:03 CET on 12 November.
Since then, scientists, flight dynamics specialists and engineers from ESA, the Lander Control Centre in Cologne, Germany, and the Philae Science, Operations and Navigation Centre in Toulouse, France have been studying the first data returned from the lander.
These revealed the astonishing conclusion that the lander did not just touch down on Comet 67P/Churyumov–Gerasimenko once, but three times.
The harpoons did not fire and Philae appeared to be rotating after the first touchdown, which indicated that it had lifted from the surface again.
Stephan Ulamec, Philae manager at the DLR German Aerospace Center, reported that it touched the surface at 15:34, 17:25 and 17:32 GMT (comet time – it takes over 28 minutes for the signal to reach Earth, via Rosetta). The information was provided by several of the scientific instruments, including the ROMAP magnetic field analyser, the MUPUS thermal mapper, and the sensors in the landing gear that were pushed in on the first impact.
The first touchdown was inside the predicted landing ellipse, confirmed using the lander’s downwards-looking ROLIS descent camera in combination with the orbiter’s OSIRIS images to match features.
But then the lander lifted from the surface again – for 1 hour 50 minutes. During that time, it travelled about 1 km at a speed of 38 cm/s. It then made a smaller second hop, travelling at about 3 cm/s, and landing in its final resting place seven minutes later.
The touchdown signal generated on first touchdown induced the instruments to ‘think’ that Philae had landed, triggering the next sequence of experiments. Now those data are being used to interpret the bounces.
Preliminary data from the CONSERT experiment suggest that Philae could have travelled closer to the large depression known as Site B, perhaps sitting on its rim. High-resolution orbiter images, some of which are still stored on Rosetta, have yet to confirm the location.
The lander remains unanchored to the surface at an as yet undetermined orientation. The science instruments are running and are delivering images and data, helping the team to learn more about the final landing site.
The descent camera revealed that the surface is covered by dust and debris ranging from millimetre to metre sizes. Meanwhile, Philae’s CIVA camera returned a panoramic image that on first impressions suggests the lander is close to a rocky wall, and perhaps has one of its three feet in open space.
Raumfahrt
After discussions as to whether to activate those science instruments that may cause the position of Philae to shift, MUPUS and APXS have both been deployed.
The primary battery enabling the core science goals of the lander may run out some time in the next 24 hours. As for the secondary battery, charged by solar panels on Philae, with only 1.5 hours of sunlight available to the lander each day, there is an impact on the energy budget to conduct science for a longer period of time. The original landing site offered nearly seven hours of illumination per 12.4 hour comet day.
.
Quelle: ESA
.
Update: 16.00 MEZ
.
Überlebenskünstler Philae: Alle Instrumente im Einsatz

Es war nicht nur die erste Landung überhaupt auf einem Kometen, sondern auch gleich die zweite und die dritte - seit dem 12. November 2014 um 18.32 Uhr mitteleuropäischer Zeit sitzt Lander Philae auf der Oberfläche des Kometen Churuymov-Gerasimenko und liefert Daten. "Wir haben jetzt die Thermalsonde MUPUS und den Bohrer SD2 eingeschaltet", berichtet Koen Geurts aus dem Lander Control Center des Deutschen Zentrums für Luft- und Raumfahrt (DLR).Von dort aus wird Philae gesteuert und kommandiert. "Wir im Lander-Kontrollraum sind alle sehr glücklich, dass wir auch unter diesen ungewöhnlichen Umständen noch alle zehn Instrumente aktivieren konnten und die Forscher-Teams wissenschaftliche Daten erhalten. Philae ist ein echter Überlebenskünstler."
Noch am Abend des 12. November 2014 war die Stimmung im Lander Control Center (LCC) extrem angespannt: "Wir haben unverzüglich an dem ersten Signal des Aufsetzens gesehen: Philae bleibt in Bewegung." Und so brach auch kein begeisterter Jubel aus - stattdessen blickten die Ingenieure eher sorgenvoll auf die Daten aus dem All. Relativ schnell war dem Kontrollraum-Team in Köln klar, dass die Harpunen anscheinend nicht gefeuert wurden, und Philae somit nicht auf der Kometenoberfläche verankert war. Die Daten der Solarpaneele zeigten vielmehr, dass der Lander sich anscheinend noch um sich drehte. Dies hätte bei einer erfolgreichen Landung nicht der Fall sein dürfen.
Fieberhaft analysierten das Kontrollraum-Team und die Wissenschaftler die Daten, die Philae bisher gesendet hatte. Schließlich stand fest: Der Lander war nach dem ersten Aufsetzen wieder abgeprallt und erst nach knapp zwei Stunden - um 18.25 Uhr - erneut aufgesetzt. Dann folgte ein weiterer, achtminütiger Hüpfer, bis der Lander um 18.32 Uhr stehenblieb. Landeplatz Agilkia war somit Vergangenheit. Über 500 Millionen Kilometer von der Erde entfernt, stand Philae nun an einem Ort, den niemand kannte. Rund um die Uhr wertete das Team im Lander Control Center die Daten aus. Im Laufe der Nacht war dann klar - er hat die ungewöhnliche Mehrfach-Landung nicht nur unbeschadet überstanden, sondern arbeitet sein Arbeitsprogramm ab. Unverzüglich passte das Kontrollraum-Team die Kommandos für den Lander an die neue Situation an.
Zumindest eines stellte Churyumov-Gerasimenko bei dieser Landung gleich unter Beweis: seine Festigkeit. Nach dem ersten Aufsetzen prallte Philae von dem Kometen ab und schwebte mehrere hundert Meter zurück ins All. "Die Oberfläche kann also nicht besonders weich sein, sonst hätte der Lander keinen so großen Hüpfer gemacht", erläutert DLR-Kometenforscher Dr. Ekkehard Kührt, der die wissenschaftliche Beteiligungen des DLR an der Rosetta-Mission leitet.
Erste Daten von der Oberfläche eines Kometen
"Wir waren in Kontakt mit der Kometenoberfläche und können mit diesen Daten sehr gut wissenschaftlich arbeiten", sagt Martin Knapmeyer vom DLR-Institut für Planetenforschung. Der Wissenschaftler gehört zum Team des Instruments CASSE, das die mechanischen Eigenschaften, beispielsweise die Festigkeit, des Kometen untersucht. Eingeschaltet war es bereits vor der Abtrennung des Landers aus der Sonde und zeichnete beim Abstieg unter anderem die Vibrationen des Schwungrads auf. Auch die Erschütterung der ersten Landung konnten die Wissenschaftler in ihren Daten erkennen.
Das Magnetometer ROMAP war ebenfalls wichtig, um die Vorgänge der dreifachen Landung nachzuvollziehen: "Unsere Daten zeigen die Bewegung von Philae, und wir sehen deutlich, dass er nach den ersten beiden Landung wieder ins Taumeln geriet und sich um die eigene Achse drehte", sagt Hans Ulrich Auster von der TU Braunschweig. Auch der Mast, der beim Abstieg für die Messungen ausgefahren wurde, reagierte auf die Landungen. "Wir werden jetzt mit der Auswertung unserer Daten beginnen." Das ROMAP-Team untersucht, ob der Komet ein eigenes Magnetfeld hat.
Auch die ROLIS-Kamera lieferte dem Wissenschaftler-Team um Dr. Stefano Mottola vom DLR-Institut für Planetenforschung die begehrten Bilder von der Kometenoberfläche. Bereits vor der ersten Landung nahm die Kamera bei der Annäherung an Churyumov-Gerasimenko Fotos auf - und konnte auch das erste Bild überhaupt direkt von der Kometenoberfläche aus erstellen.
"Kämpfen um jedes bisschen Energie"
Der technische Leiter des Landers, Koen Geurts, ist mit dem Zustand von Philae mehr als zufrieden: "Er funktioniert selbst an dem neuen Landestelle tadellos." Mit dem Einsatz des Bohrers folgt nun das letzte Instrument, das noch nicht in Betrieb war. Die Lebensdauer der Batterie ist allerdings begrenzt: Sehr wahrscheinlich wird das Team heute gegen 21 Uhr das letzte Mal mit dem Lander kommunizieren können. "Wir kämpfen um jedes bisschen Energie und sparen, wo es nur geht." Die Landestelle am Rand eines Kraters bietet lediglich 1,5 Stunden Sonnenlicht am Tag - das reicht wohl nicht, um die Batterien mit Sonnenenergie aufzuladen. Ist die Batterie leer, wird Philae automatisch in einen Schlafmodus schalten und sich erst zurückmelden, wenn seine Energie wieder ausreicht. "Es könnte sein, dass er bei der Annäherung an die Sonne aufladen kann - das wird aber wahrscheinlich nicht in den nächsten zwei Monaten sein", schätzt Koen Geurts. "Aber wir haben erfolgreich dafür gearbeitet, dass die erste Landung auf einem Kometen auch aus wissenschaftlicher Sicht gelungen ist."
.
Hier eine andere Ansicht - ebenfalls von #Rosetta vor der Abtrennung und Landung aufgenommen.
Quelle: DLR
.
Update: 15.11.2014
.
TURNING PHILAE
Update from ESA's Main Control Room: as mentioned in today's ESAHangout, ground controllers are planning to issue a 'turn command' to Philae later this evening.
The aim will be to rotate Philae's main body in the hopes of exposing one of the larger solar panels to the meagre sunlight that is falling on one of the smaller ones.
"The rotation of the lander's body could result in more power if one of the larger solar panels can catch the illumination that is falling on the smaller," says ESA's Mark McCaughrean, senior science advisor.
"All things being equal, the same amount of sunlight falling on a larger panel should result in more power being generated."

The command to make the turn will be uploaded sometime after Rosetta establishes contact with the lander, expected to happen any time now.
Philae's planned mission is expected to come to an end when batteries are exhausted sometime on Saturday; future contacts are possible if the illumination conditions change as the comet orbits closer to the Sun, enabling solar power to flow again.
The Rosetta orbiter mission continues as planned, with an immense amount of science observations still to come.
.
SIGNAL ACQUIRED 22:19 CET – WAITING CONFIRMATION
Rosetta deputy flight director Elsa Montagnon in ESOC's Main Control Room just announced: We acquired signals from Philae just a few minutes ago, but then lost contact again.
This has happened in two of the three previous communication passes with Philae, when initial contact was lost and then regained several times. It has taken up to an hour to establish a stable telecom link to the surface, so this is 'normal' behaviour.
The mission control team continues watching closely.
.
PHILAE STILL TALKING!
Rosetta has regained contact with Philae sitting on the surface of a comet (511 million km away!) during tonight’s communication pass, confirming that the lander still has power on the surface of Comet 67P/Churyumov-Gerasimenko.
The pass began at 22:29 GMT / 23:29 CET, which was within the window of expectation.
Against the odds – with no downward thruster and with the automated harpoon system having not worked – the intrepid Philae lander touched down a total of three times on the comet before coming to a final resting place on Wednesday.
While the search for the final landing site is still on-going, the lander is racing against the clock to meet as many of the core science goals as possible before the primary battery is exhausted. Under the low illumination conditions at Philae’s location, it is unlikely that the secondary batteries will charge up enough to enable extended surface operations.
All of the science instruments were deployed, including the instruments that required mechanical movement, such as APXS, MUPUS, and the drill, SD2, which is designed to deliver samples to the PTOLEMY and COSAC instruments inside the lander.
The lander team will now be examining the data to confirm if all the experiments were completed.




Philae's planned mission is expected to come to an end when batteries are exhausted sometime on Saturday; future contacts are possible if the illumination conditions change as the comet orbits closer to the Sun, enabling solar power to flow again.
The Rosetta orbiter mission continues as planned, with an immense amount of science observations still to come.
.
FIRST HOUR OF LANDER COMMUNICATION
Update from Stephan Ulamec, Lander manager at DLR:
“We’ve got data – all the house-keeping data and data from COSAC – although we’ve no idea what’s in there yet. The drill (SD2) moved up and down, but again, we don’t yet know what we have.”
“We did the lift and turn; the landing gear lifted by about 4 cm, and we turned about 35 degrees.
“The carousel of Ptolemy was also turned and we are running Ptolemy for a concentrated 'sniff'.”
Instrument reminder:
COSAC: The COmetary SAmpling and Composition experiment (detecting and identifying complex organic molecules)
PTOLEMY: an evolved gas analyser, which obtains accurate measurements of isotopic ratios of light elements, such as hydrogen, carbon, nitrogen and oxygen.
SD2: Sampling, drilling and distribution subsystem (drilling up to about 23 cm depth and delivering material to onboard instruments for analysis)
Quelle: ESA
....
Update:
.
LANDER BATTERY VOLTAGE FALLING FAST
On board Philae, system voltage has fallen very close to 21.5V; below that, the battery won't last much longer. At this time, there is insufficient sunlight to provide power.
.
OUR LANDER’S ASLEEP
With its batteries depleted and not enough sunlight available to recharge, Philae has fallen into 'idle mode' for a potentially long silence. In this mode, all instruments and most systems on board are shut down.
"Prior to falling silent, the lander was able to transmit all science data gathered during the First Science Sequence," says DLR's Stephan Ulamec, Lander Manager, who was in the Main Control Room at ESOC tonight.
"This machine performed magnificently under tough conditions, and we can be fully proud of the incredible scientific success Philae has delivered."
ESA_Rosetta_Philae_CIVA_FirstPanoramic_woLanderContact was lost at 00:36 UTC / 01:36 CET, not long before the scheduled communication loss that would have happened anyway as Rosetta orbited below the horizon.
From now on, no contact would be possible unless sufficient sunlight falls on the solar panels to generate enough power to wake it up.
The possibility that this may happen was boosted this evening when mission controllers sent commands to rotate the lander's main body, to which the solar panels are fixed. This may have exposed more panel area to sunlight.
The next possible communication slot begins on 15 November at about 10:00 UTC / 11:00 CET. The orbiter will listen for a signal, and will continue doing so when its orbit enables communication visibility in the future.
The hugely successful Rosetta mission will continue, as the spacecraft tracks comet 67P/C-G on its journey to the Sun. Rosetta is the first spacecraft to rendezvous with and orbit a comet and has already returned incredible scientific data.
.
Rosetta flight controllers and Philae mission managers in Main Control Room at ESOC, just after loss of contact with Philae. Credit: Steven Young/Astronomy Now
Quelle: ESA
...
PHILAE’S FIRST TOUCHDOWN SEEN BY ROSETTA
The animated image below provides strong evidence that Philae touched down for the first time almost precisely where intended, a strong testament to the precision of the flight dynamics teams who planned Philae's journey down to comet 67P/C-G. It subsequently rebounded and, after touching down a second time, came to rest where it is now – a still unconfirmed location likely outside of these images.
.
Credits: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0
The animation comprises images recorded by the navigation camera (NAVCAM) on board Rosetta as the orbiter flew over the (intended) Philae landing site on 12 November.
The images were taken at
2014-11-12 T15:30:32 UTC
2014-11-12 T15:35:32 UTC
The landing time was 2014-11-12 T15:34:06 UTC onboard the spacecraft, between the timestamps of the two images.
The first image is thus 3 min 34 sec before touchdown. At this time, Philae was approximately 250m above the surface.
The second image is 1 min 26 seconds after first touchdown. The touchdown is seen as a dark area. This dark area could be considered as strong indication that the lander touched down at this spot (possibly raising dust from the impact). The third image is the same as the second, but also shows a green square; this is the computed touchdown point.
They were taken from a distance of about 15 km from the surface, giving an approximate scale of 1.3 m per pixel. The dark spot appears to be within less than 10 m of the computed touchdown point.
You can also clearly see the boulder identified in the ROLIS images just to the top right of the circle. In all images there are pairs of pixel artefacts (not the lander!).
The individual images making up the GIF are provided below.
With thanks to Emily Lakdawalla of the Planetary Society for helping with the image processing.
.
Rosetta NavCam view of Philae first landing site - 2014.11.12.15:30:32 UTC Credit: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0
.
Rosetta NavCam view of Philae first landing site - 2014.11.12.15:30:32 UTC Credit: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0
.
Rosetta NavCam view of Philae first landing site - 2014.11.12.15:35:32 Credit: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0
Quelle: ESA
.
Update: 17.11.2014
.
PHILAE SPOTTED AFTER FIRST LANDING ON 67P
On Friday, we published a series of remarkable NAVCAM images acquired by Rosetta as the orbiter monitored the intended landing point of Philae on 12 November from its orbit above Comet 67P/C-G. The images show what appears to be the shadow of a dust cloud kicked up when Philae made its first touch down on the surface of the comet at 15:35 UTC.
The images were provided by ESA's Flight Dynamics team on Friday, who sent them to the web team to be published as soon as possible: we all wanted to make sure you saw them right away. Once we had convinced ourselves that the dark 'splotch' seen in the second of the images was almost certainly the tell-tale signature of Philae's precise first touch-down and bounce, we put them out.
However, some careful work by a number of people in ESA's Flight Dynamics team and by followers of our Rosetta blog has shown that these NAVCAM images show more, namely Philae itself, just after the bounce!
.
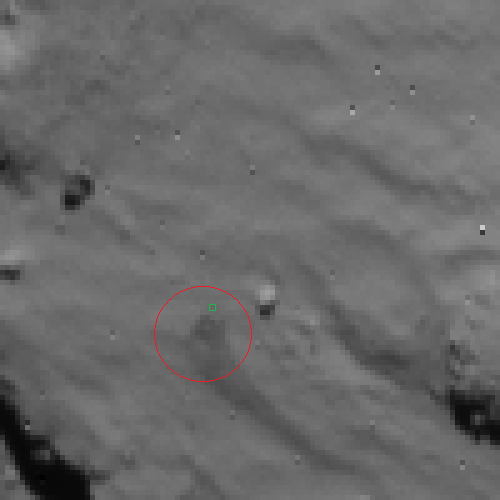
Philae touchdown site seen by Rosetta's navigation camera. The first image in this sequence was taken on 12 November at 15:30 UTC, just before the lander's first touchdown; the second image was taken at 15:35 UTC, right after touchdown. The large red circle indicates the position of the shadow of the dust cloud caused by the landing. The third image in the sequence is the same as the second, with the likely position of Philae and its shadow highlighted. Credits: ESA/Rosetta/NAVCAM; pre-processed by Mikel Catania
It appears as a couple of brighter pixels closely accompanied by its shadow in the form of a couple of darker ones just below, both to the right of the diffuse dust cloud shadow.
Credit for the first discovery goes to Gabriele Bellei, from the interplanetary division of Flight Dynamics, who spent hours searching the NAVCAM images for evidence of the landing.
Once the images were published, blog reader John Broughton posted a comment to report that he had spotted the lander in them (thank you, John). There was also quite some speculation by Rosetta blog readers in the comments section, wondering which features might be attributable to the lander. Martin Esser, Henning, Kasuha and Haring in particular were among the first to make insightful observations on the topic, although many others have since joined in.
Last but not least, a careful independent review of the images was made by Mikel Catania from the earth observation division of Flight Dynamics, with the same conclusion. He also made the annotated animation shown here.
So very well done, Gabriele and Mikel from Flight Dynamics, as well as John, Martin, Henning, Kasuha and everyone else from the blog: thank you from all of us for helping spot Philae!
P.S. Note that in our rush to share these exciting images with you on Friday, we made a couple of small errors in the labels and text; those have been updated now. In particular, the image that was indicated to have been taken at 15:30:32 UTC, just before touchdown, was actually an image taken at 16:30:32 UTC, about an hour after touchdown. This should indeed have been clear from the obviously changed illumination conditions, but the web team were very tired at the time.
Also, Flight Dynamics have clarified that the green square on Friday's images is actually the computed touchdown point based on data taken during the deployment and descent to the surface, not the originally intended landing point. Nevertheless, it's still very close to the latter, again a testament to the excellent work done by Flight Dynamics.
.
OSIRIS SPOTS PHILAE DRIFTING ACROSS THE COMET
These incredible images show the breathtaking journey of Rosetta’s Philae lander as it approached and then rebounded from its first touchdown on Comet 67P/Churyumov–Gerasimenko on 12 November 2014.
.
Credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
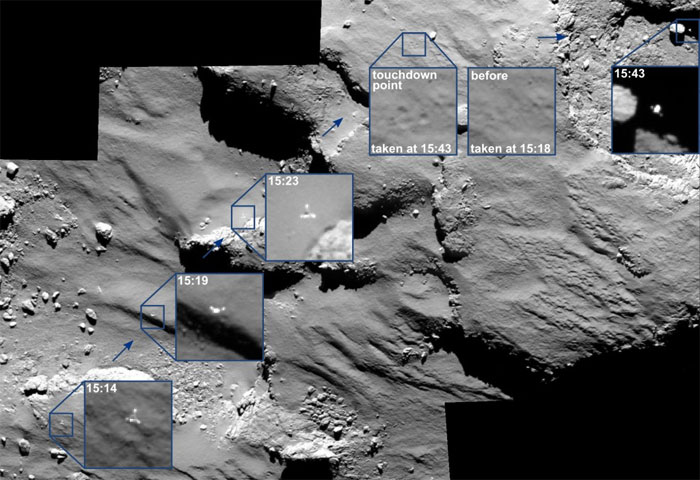
The mosaic comprises a series of images captured by Rosetta’s OSIRIS camera over a 30 minute period spanning the first touchdown. The time of each of image is marked on the corresponding insets and is in GMT. A comparison of the touchdown area shortly before and after first contact with the surface is also provided.
The images were taken with Rosetta’s OSIRIS narrow-angle camera when the spacecraft was 17.5 km from the comet centre, or roughly 15.5 km from the surface. They have a resolution of 28 cm/pixel and the enlarged insets are 17 x 17 m.
From left to right, the images show Philae descending towards and across the comet before touchdown. The image taken after touchdown, at 15:43 GMT, confirms that the lander was moving east, as first suggested by the data returned by the CONSERT experiment, and at a speed of about 0.5 m/s.
The final location of Philae is still not known, but after touching down and bouncing again at 17:25 GMT, it reached there at 17:32 GMT. The imaging team is confident that combining the CONSERT ranging data with OSIRIS and navcam images from the orbiter and images from near the surface and on it from Philae’s ROLIS and CIVA cameras will soon reveal the lander’s whereabouts.
.
The insets are provided separately below (the timestamps are recorded in the filenames).
All images credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
.
Churyumov-Gerasimenko: Harte Eisschichten und organische Moleküle
Als Lander Philae am 15. November 2014 um 1.36 Uhr in den Ruhezustand ging, hatte er mit Hilfe seiner Primärbatterie etliches geleistet: Über 500 Millionen Kilometer entfernt von der Erde hatte das Mini-Labor mit zehn Instrumenten an Bord nach der Atmosphäre geschnüffelt, gebohrt, gehämmert und den Kometen durchleuchtet. Dabei hatte er nach einer dreifachen Landung und einem neuen, ungeplanten Standort nicht die günstigsten Voraussetzungen. Mehr als 60 Stunden arbeitete Philae dennoch kontinuierlich und schickte bei jeder Funkverbindung Daten. Gesteuert und kommandiert wurde er dabei aus dem Lander Control Center (LCC) des Deutschen Zentrums für Luft- und Raumfahrt (DLR). Nun beginnt die aufwendige Datenauswertung. Der wissenschaftliche Leiter des DLR-Projekts, Dr. Ekkehard Kührt, ist mit den bisherigen Ergebnissen sehr zufrieden. "Wir haben viele wertvolle Daten gesammelt, die man nur in direkter Berührung mit dem Kometen erhalten kann. Zusammen mit den Messungen der Rosetta-Sonde sind wir auf einem guten Weg, Kometen besser zu verstehen. Ihre Oberflächeneigenschaften scheinen ganz anders zu sein als bisher gedacht!"
Eisige Härte
Fest wie Eis ist Churyumov-Gerasimenko, schätzt das Team der Thermalsonde MUPUS (Multi-Purpose Sensors for Surface and Sub-Surface Science), deren Sonde sich in den Kometen hämmern sollte: "Obwohl die Leistung des Hammers stufenweise erhöht wurde, konnten wir sie nicht tief in den Boden fahren", erläutert Prof. Tilman Spohn vom DLR-Institut für Planetenforschung, der das Forscherteam der Thermalsonde leitet. Kurz nach der dreifachen Landung konnten die Wissenschaftler nur hoffen, dass Lander Philae in einer Position aufsetzen würde, die das Hämmern erlauben würde. Zum ersten Mal konnte mit MUPUS jedoch direkt auf einer Kometenoberfläche deren Festigkeit untersucht werden – und Churyumov-Gerasimenko erwies sich überraschenderweise als harter "Gegner". "Wir haben reiche Ernte eingefahren und müssen diese Daten jetzt noch alle analysieren", betont Kometenforscher Spohn. Lediglich die Thermalsensoren und Beschleunigungsmessern in den Ankern kamen nicht zum Einsatz, da diese bei der Landung nicht ausgelöst wurden, um Philae auf der Kometenoberfläche zu fixieren.
Horchen am Kometen
Auch das Team des SESAME-Experiments (Surface Electrical, Seismic and Acoustic Monitoring Experiments) kann bereits jetzt bestätigen, dass Churyumov-Gerasimenko bei weitem nicht so weich und fluffig ist, wie man es angenommen hatte. "Die Festigkeit der Eisschicht unter einer Staubschicht am ersten Landeplatz ist überraschend hoch", sagt Dr. Klaus Seidensticker vom DLR-Institut für Planetenforschung. Das Instrument CASSE, das in den Füßen des Landers sitzt, wurde bereits beim ersten Abstieg eingeschaltet und registrierte deutlich die Landung beim ersten Kontakt mit dem Kometen. Aus den weiteren Daten sollen die mechanischen Eigenschaften von Churyumov-Gerasimenko abgeleitet werden. Zwei weitere Instrumente von SESAME lassen auf eine derzeit noch geringe Aktivität des Kometen an dieser Landestelle sowie auf eine größere Menge Wassereis unter dem Lander schließen.
Schnüffeln nach organischen Molekülen
Als letzte der zehn Instrumente an Bord von Lander Philae wurden der Bohrer SD2 aktiviert, der Bodenproben für die Instrumente COSAC und PTOLEMY zur Verfügung stellen sollte. Sicher ist, dass der Bohrer ausgefahren wurde und alle Arbeitsschritte abarbeitete, um eine Probe in den dafür vorgesehenen Ofen zu transportieren. Auch COSAC funktionierte wie geplant. Nun müssen die Wissenschaftler die gewonnen Daten analysieren, um herauszufinden, ob eine Bodenprobe tatsächlich in ihrem Gas-Chromatographen untersucht wurde. Geschehen soll dies in Zusammenarbeit mit mehreren Instrument-Teams: Hat CASSE das Bohren gehört? Auf welche Bodenfestigkeit ist MUPUS beim Hämmern gestoßen? Mit welcher Kraft kam Bohrer SD2 zum Einsatz? "Wir haben zurzeit noch keine Informationen über Menge und Gewicht der Bodenprobe", sagt Dr. Fred Goesmann vom Max-Planck-Institut für Sonnensystemforschung. Allerdings konnte COSAC bereits nach der Landung die Atmosphäre "erschnüffeln" und die ersten organischen Moleküle aufspüren. Die Analyse der Spektren und die Identifikation der Moleküle laufen zurzeit.
Fotos und Radiowellen vor dem Winterschlaf
Einer der großen "Gewinner" der Philae-Landung ist Dr. Stefano Mottoloa der für die Kamera ROLIS verantwortlich ist. Das Instrument an der Unterseite der Kamera nahm bereits während des ersten Abstiegs Fotos auf, die den geplanten Landeplatz Agilkia zeigen. Aber auch nach der dritten Landung konnte ROLIS erneut aktiviert werden und Aufnahmen der Kometenoberfläche aus nächster Nähe anfertigen. Somit liegen dem Team nun Daten für gleich zwei verschiedene Standorte auf dem Kometen vor.
Auch für das Instrument CONSERT konnten reichlich Daten gewonnen werden: Dabei befanden sich Lander und Orbiter auf unterschiedlichen Seiten des Kometen und durchleuchteten gemeinsam den Kometenkern, um ein dreidimensionales Profil des Kerns zu erstellen. Mit CONSERT-Messungen verabschiedete sich Philae auch in den Winterschlaf, nachdem die Energie seiner Primärbatterie wie berechnet erschöpft war. Diese Batterie war bereits in aufgeladenem Zustand mit durchs All geflogen, um die erste wissenschaftliche Arbeitsphase sicherzustellen.
Warten auf Nachricht von Philae
"Ich bin aber sehr zuversichtlich, dass Philae wieder Kontakt mit uns aufnimmt und wir erneut die Instrumente betreiben können", sagt Lander-Projektleiter Dr. Stephan Ulamec vom DLR. Hat sich die wiederaufladbare Sekundärbatterie des Landers durch die Sonneneinstrahlung wieder aufgewärmt, meldet sich Philae selbstständig und das Team des Lander-Kontrollzentrums am DLR nimmt seine Arbeit an den Steuerkonsolen erneut auf. "Auf dem ersten Landeplatz hätten wir dazu natürlich bessere Beleuchtungsbedingungen vorgefunden", sagt Ulamec. "Jetzt stehen wir etwas schattiger und werden für das Aufladen länger benötigen." Ein Vorteil des schattigeren Landeplatzes an einem Kraterrand: Lander Philae wird bei der Annäherung an die Sonne nicht so schnell überhitzen, sondern von der stärkeren Sonneneinstrahlung profitieren. Dafür drehte das Lander-Kontrollteam Philae in der Nacht vom 14. auf den 15. November 2014, so dass dass größte Solarpaneel nun in Richtung Sonne ausgerichtet ist.
Kontakt im kommenden Jahr
Wahrscheinlich im Frühjahr 2015, so schätzt DLR-Wissenschaftler Dr. Stephan Ulamec, kann das Lander-Kontrollzentrum des DLR wieder mit Philae kommunizieren und eine kurze Rückmeldung erhalten, wie es dem Lander auf Churyumov-Gerasimenko geht. Im Sommer 2015 könnten dann auf dem Kometen Temperaturen herrschen, die es Philae erlauben, seine Batterie aufzuladen. "Der Orbiter wird bei seinen Überflügen auf Empfang sein und hören, sobald Philae wieder aus dem Winterschlaf aufwacht."
Die Mission
Rosetta ist eine Mission der ESA mit Beiträgen von ihren Mitgliedsstaaten und der NASA. Rosettas Lander Philae wird von einem Konsortium unter der Leitung von DLR, MPS, CNES und ASI beigesteuert.
Quelle: DLR
.
Update: 18.11.2014
.
PHILAE SETTLES IN DUST-COVERED ICE
Before going into hibernation in the early hours of 15 November 2014, the Philae lander was able to conduct experiments and return its data to Earth. In this blog post we look at the preliminary analysis conducted by the lander’s Multi-Purpose Sensors for Surface and Subsurface Science instrument package, MUPUS.
.
MUPUS began observing the environment around Comet 67P/Churyumov-Gerasimenko once Philae was released from the Rosetta orbiter at 08:35 GMT on 12 November (this is spacecraft time; the signal confirming separation arrived at Earth just over 28 minutes later, at 09:03 GMT).
The first touchdown recorded by Philae occurred at 15:34 GMT (with the signal arriving on Earth at 16:03 GMT), but it later transpired that the harpoons and ice screws did not deploy as planned and the lander subsequently rebounded, experiencing two further touchdowns, at 17:25 and 17:32 GMT (spacecraft time), respectively.
Because part of the MUPUS package was contained in the harpoons, some temperature and accelerometer data could not be gathered. However, the MUPUS thermal mapper, located on the body of the lander, worked throughout the descent and during all three touchdowns.
At Philae’s final landing spot, the MUPUS probe recorded a temperature of –153°C close to the floor of the lander’s balcony before it was deployed. Then, after deployment, the sensors near the tip cooled by about 10°C over a period of roughly half an hour.
“We think this is either due to radiative transfer of heat to the cold nearby wall seen in the CIVA images or because the probe had been pushed into a cold dust pile,” says Jörg Knollenberg, instrument scientist for MUPUS at DLR.
The probe then started to hammer itself into the subsurface, but was unable to make more than a few millimetres of progress even at the highest power level of the hammer motor.
“If we compare the data with laboratory measurements, we think that the probe encountered a hard surface with strength comparable to that of solid ice,” says Tilman Spohn, principal investigator for MUPUS.
Looking at the results of the thermal mapper and the probe together, the team have made the preliminary assessment that the upper layers of the comet’s surface consist of dust of 10–20 cm thickness, overlaying mechanically strong ice or ice and dust mixtures.
At greater depths, the ice likely becomes more porous, as the overall low density of the nucleus – determined by instruments on the Rosetta orbiter – suggests.
6026 Views