
.
29.10.2014
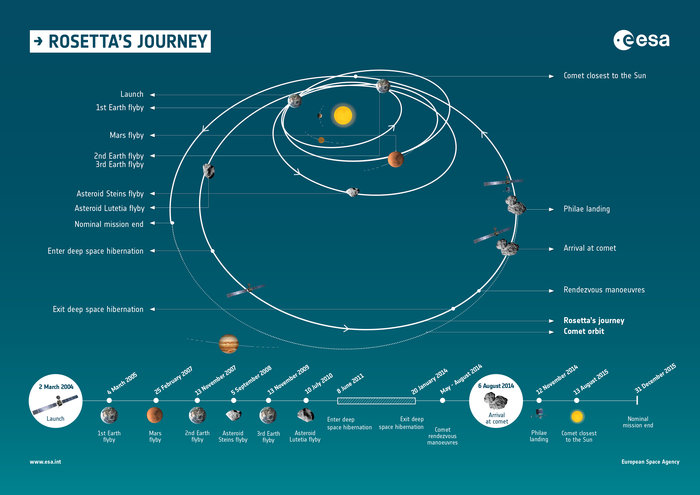
Infographic and timeline summarising the milestones of Rosetta’s journey through the Solar System.
.
COSIMA DETECTS SODIUM AND MAGNESIUM IN A DUST GRAIN CALLED BORIS
Early in September we reported that Rosetta’s COSIMA instrument, the COmetary Secondary Ion Mass Analyser, had detected its first dust grains. Now some results from the first compositional analyses are in, as Martin Hilchenbach reports for the COSIMA team:
Secondary ions of a cometary grain collected next to Comet 67P/C-G.
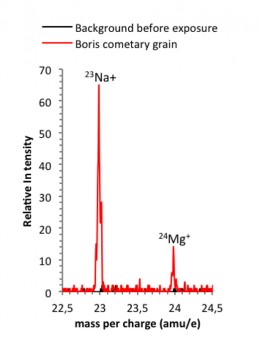
This spectrum shows the positive mass per charge from 22.5 amu/e to 24.5 amu/e obtained on 7 August 2014, before exposure of the first COSIMA target-holders (shown in black) and from the “shot and hit” grain Boris (shown in red) collected during the second exposure week (18-24 August 2014) at about 80 km from Comet 67P/C-G. Each spectrum is the sum of two spectra taken at the same position, each taken for a period of 2.5 minutes.
Credit : ESA/Rosetta/MPS for COSIMA Team MPS/CSNSM/UNIBW/TUORLA/IWF/IAS/ESA/BUW/
MPE/LPC2E/LCM/FMI/UTU/LISA/UOFC/vH&S
COSIMA started to expose one of its 24 target-holders in the inner coma of Comet 67P/C-G early in the morning of 11 August 2014 and, since then, this plate has been imaged weekly to detect new dust grains. It was certainly good to do this even in this very early mission phase with low comet activity, as pictures taken on 24 August 2014 revealed a collection of small to moderately large grains (see image in COSIMA catches cosmic dust).
Detecting grains is not the end of the story; once we have detected one or more grains the next step is to investigate their composition. One of the first grains to be analysed by COSIMA for its chemical mineral composition was the cometary dust grain that we’ve nicknamed Boris. Since we have to discuss a lot of our science and science planning over the phone, naming features or grains is essential for communication within the COSIMA team. But, while some team members were at first very thrilled to have a “personal” cometary grain, they pretty soon figured out that there was a tiny hitch attached: To get a first grip on the chemical composition, we have to shoot indium ions at the grain… so, COSIMA recently shot Boris and while the full analysis of this ‘incident’ is still pending, we would like to share the very first results and explain how this was achieved.
COSIMA is a time-of-flight secondary ion mass spectrometer equipped with a primary ion gun (PIBS), dust collectors, an optical microscope (COSISCOPE) for grain imaging and location, and a robot (TMU) to move the target in front of the different instrument stations (exposure, imaging, analysis, storage, heating, cleaning).
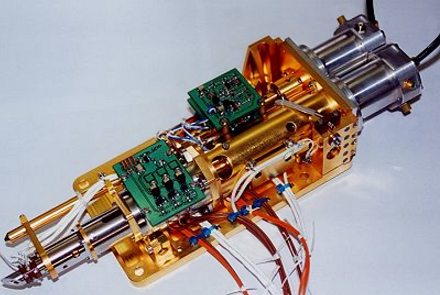
PIBS is an essential COSIMA subsystem. It was developed by Laboratoire de Physique et Chimie de l’Environnement et de l’Espace (LPC2E at CNRS/Université d’Orléans, France). The two indium-115 sources were provided by Austrian teams in Seibersdorf (OFZS) and Graz (IWF). Image courtesy C. Briois
.
To perform the chemical analysis, PIBS is focused on regions of interest on the target plate – these can be for either a dedicated measurement of the background emission or to analyse potential cometary grains (such as Boris). A primary ion beam of indium-115, about 50 µm in diameter, sprays the surface of the selected feature in order to extract secondary ions that are sputtered off the feature. By switching polarity of the mass spectrometer potentials, COSIMA is able to collect either positive or negative secondary ions. These ions are accelerated by an electric field off the grain and are sorted according to their velocity. Then the trail of ions is counted one by one by the microsphere plate ion detector according to their arrival time, with an accuracy of about 2 ns. The time it takes an ion to hit the plate allows us to calculate its mass, because lighter ions arrive first and heavier ions arrive later. When we plot the mass per charge spectrum of the ions we can clearly see the chemical composition of the grain surfaces.
The PIBS ion optics concept is sophisticated and unique. When operating PIBS we can select one of two redundant primary ion emitters. Furthermore, sample analysis with a small beam spot and very short ion pulses or surface cleaning of a larger area with a continuous beam can be carried out. But the primary ion beam is not obtained simply by just switching PIBS on and off. Instead, it has to be pulsed to gently spray the sample surface. To create the 'spray' indium ions generated from the emitter source pass through a chopper-buncher system. The chopper creates a beam packet by chopping the beam into 48 ns bundles each of which is then compressed by the buncher to provide a 3 ns pulsed beam of about 2000 ions, all in phase, on the sample. The sketch and description below illustrates the buncher function:
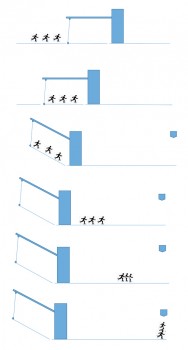
Sketch to illustrate COSIMA primary ion beam buncher. (See text for description). Image courtesy L. Thirkell
.
Imagine a group of students skating on a road at same speed, one behind the other – these are our packet of ions. A drawbridge whose length is longer than the group of skaters is in front of them. When all the skaters (still travelling at the same speed) are on the drawbridge it rises up 30° at a speed that is fast compared to the speed of the skaters. All the skaters now skate down the slope and, after the bridge, each skater has increased his/her speed in proportion to where he/she was in the group (the last one obtaining a higher speed than the first). In the end, the skaters who were at the back of the group will catch up with the front of the pack, and all of them will arrive at the finish line at the same time.
But we digress – back to our grain Boris. First, we had to measure the secondary ion yield of the target holder, to understand the ‘background’ signal from the plate – this background signal is the black line in the plot that we show at the start of this post. Then we 'shot' Boris with the indium-115 beam and collected secondary ions sputtered of the grain – what we measured is shown by the red line in the plot. (Incidentally, it is not an easy task to hit a 30-50 micron spot that is at 3 AU from your office...!)
As you can see from the plot, these first results show that among the grain’s components are magnesium and sodium. Since 95 percent of the known observed minerals in comets resemble olivine and pyroxenes – containing a lot of magnesium – the detection of this element is not a big surprise. But, finding sodium in the dust grain, in a refractory mineral phase, has sparked our interest considerably.
The coma and tails of other comets are already known to contain sodium; it was observed in the dust samples returned from Comet Wild 2 by NASA’s Stardust mission, and a prominent example was also the sodium tail of Comet Hale-Bopp that flew past the Sun in April 1997 and which could be seen in the night sky for many weeks. However, by contrast, neither sodium nor magnesium were observed in Comet 67P/C-G dust grains before sampling the inner coma dust. But our dust grain Boris has showed off with clear sodium and magnesium mass peaks in the secondary ion mass spectra that we obtained.
Tracking down the source of the sodium, in other words, trying to identify in situ in the dust grains what compound contains sodium, is the next task for our team.
Quelle: ESA
.
Update: 3.11.2014
.
COMETWATCH – 26 OCTOBER
This four-image NAVCAM mosaic comprises images taken on 26 October from a distance of 9.8 km from the centre of comet 67P/C-G – about 7.8 km from the surface. The corresponding image scale is about 66 cm/pixel, so each 1024 x 1024 pixel frame is about 676 metres across.
Changes in perspective and shadows due to rotation and translation of the comet and spacecraft with respect to each other seem to be limited across this particular set of four images, which is why we’ve decided to present a mosaic this time. The mosaic covers roughly 1200 x 1350 metres. But as usual, we urge you to be cautious in over-interpreting the mosaic: the individual images, presented at the end of this post, provide the ‘ground truth’.
.
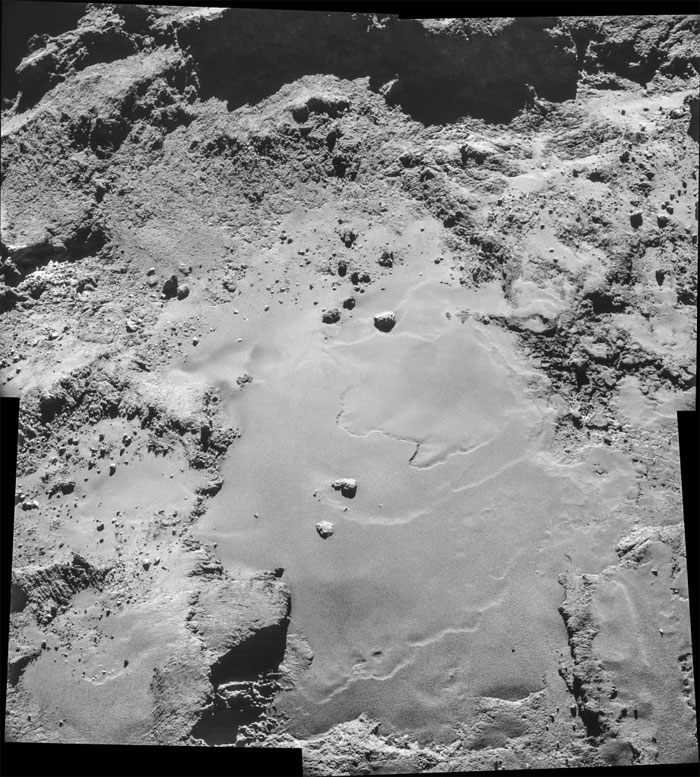
Four image NAVCAM mosaic comprising images taken on 26 October. Credits: ESA/Rosetta/NAVCAM
This scene focuses on the same part of the comet as seen in the 18 October image set, but you will notice some interesting new features, as well as some previously visited areas in a new light. (See CometWatch 8 October and the OSIRIS image of 6 August for additional context.)
Visible towards the upper left is a region of brighter material that was previously cast in shadow in the 18 October image, and that appears to lie at the base of a cliff. Some additional bright material is seen at the top of the cliff. This material may be freshly revealed and yet to be covered in dust, perhaps as the result of a recent ‘landslide’. It remains to be seen what its composition is, but no doubt the science teams will be looking out for its signature in the remote sensing data.
Remember though, that this material isn’t in fact bright white on the comet; comets are blacker than coal, and the NAVCAM images are grey-scaled according to their brightness with additional contrast adjustments to bring out the full range of features (see NAVCAM’s shades of grey for a full recap of the way in which intensities are displayed in NAVCAM images).
Also not seen previously in this much detail are the two boulders just below the centre of the mosaic, one of which takes on a heart-shaped appearance from this angle. Zooming in reveals hints of a layered structure and both objects seems to be appearing from beneath the dusty layer, just like some of the smaller ‘boulders’ around them.
Finally, over on the right hand side of the mosaic, the region cast in dramatic shadow on 18 October can now be seen in much more detail. And don’t forget the boulder Cheops and friends above the centre of the mosaic too!
.
.
COMETWATCH – 28 OCTOBER
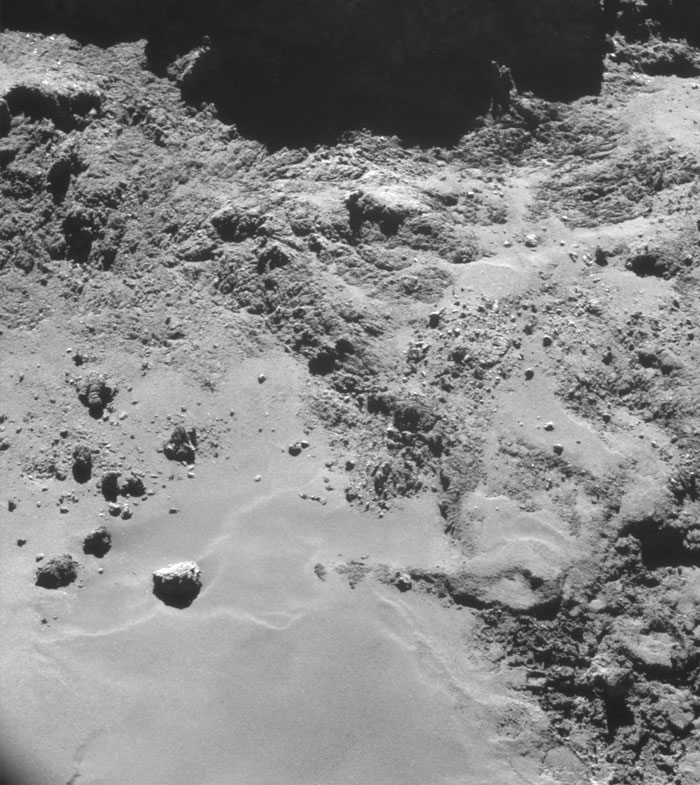
This four-image NAVCAM montage comprises images taken on 28 October – shortly before moving to the pre-lander delivery orbit – from a distance of 9.7 km from the centre of comet 67P/C-G, or roughly 7.7 km from the surface.
The corresponding image scale is about 65 cm/pixel, so each 1024 x 1024 pixel frame is about 665 m across. The montage has been slightly tweaked and the central vignetting reduced. The four original frames are provided at the end of the post.
.
Four-image NAVCAM montage comprising images taken on 28 October. Credits: ESA/Rosetta/NAVCAM
The montage nicely ‘joins the dots’ with the region presented in the 8 October montage.
Given the peculiar low-density, low-gravity nature of a comet, it is perhaps dangerous to make direct analogies with Earth-like features and processes. But until we have the science team’s analysis of what they think is actually happening on this comet, analogies might nevertheless still provide a useful way of trying to decipher what we are seeing.
In a number of places in this region, there is an impression that the prevalent dusty material covering the surface is not particularly stable and that it occasionally gives way, perhaps in a similar way that snow on a mountain side may become dislodged, giving rise to an avalanche or, alternatively, a rockfall or landslide. For example, look in the lower third of the top left image. There you’ll see what looks like a crack close to the edge of the cliff, suggesting that this portion might eventually collapse, similar to the way a snow cornice on a mountain ridge peels away. This feature is also visible in the 8 October image.
Another example can be seen in the lower right corner of the bottom right image, where material appears to have slid over the edge of a cliff.
On Earth, avalanches are typically triggered by an increased load, leading to the mechanical failure of a slab of material under gravity, or due to melting snow as a result of increased solar radiation. On a comet, presumably the latter process is more likely to occur, with sublimation-based erosion acting to weaken the surface material, resulting in a collapse.
.

Quelle: ESA
.
Update: 4.11.2014
.
ROSETTA NAVCAM IMAGES NOW AVAILABLE UNDER A CREATIVE COMMONS LICENCE
Guest blog post by Marco Trovatello, ESA cross-media coordinator and Mark McCaughrean, ESA senior scientific advisor.
As of today, we will be sharing all Rosetta NAVCAM images under a Creative Commons licence. In particular, we will be releasing them under the so-called “attribution share-alike” version of the licence, ported for use by intergovernmental organisations, referred to in short as CC BY-SA 3.0 IGO.
We’ll explain the background and how this works in more detail below, but essentially it allows you to share them with whoever you like, to publish them on your blog or elsewhere, to adapt or remix them (e.g. to add in the Eiffel Tower for size comparison purposes), or to post them on Wikipedia. You can even use them for commercial purposes under certain conditions.
You can do all of this without our additional permission, as long that you clearly credit ESA as the source. You also have to mention and provide a direct link to the licence, and if any changes are made to the images, your remix or adaptation must be published under the same licence terms (CC BY-SA 3.0 IGO). You must also not give any suggestion that ESA necessarily endorses the modifications that you have made.
Sound complicated? It isn’t at all. Here’s the credit you need to give us:
Image: ESA/Rosetta/NAVCAM, CC BY-SA IGO 3.0
That’s it (and don’t forget to make the last part a link!).
When space is really tight, in a tweet for example, it is sufficient if the original source (e.g.. your blog post containing the image) carries this credit line.
So far, so good.
For those who never heard of Creative Commons licences and how they work, let us get into a bit more detail now.
Creative Commons (CC) is a non-profit organisation that provides a free-to-use, modular suite of licences designed for the digital age. It was founded in 2001 by Lawrence Lessig, today a Professor of Law and Leadership at Harvard University, with the aim of making the exchange and usage of cultural goods compatible with a rapidly-developing digital cultural and economic world.
The CC licence suite encompasses a whole range of options designed to encourage the sharing of material, albeit with differing levels of restriction. For example, CC BY is the most liberal licence and allows sharing, remixing, and tweaking of works, even commercially, just as long as credit to the source is given. At the other extreme, the most restrictive licence is CC BY-NC-ND, which allows them to be downloaded and shared as is, with credit given, but no commercial uses and no derivative products. CC also provides tools for placing works fully in the public domain.
One of the most remarkable aspects of the CC licence suite is its comprehensibility for laypeople, with a ‘human readable’ version of each licence designed to make them easily understood and usable without having to have a background in copyright law.
While the CC licence suite has been available for quite some time, it became apparent that some of the legal backing was not entirely suitable for Inter-Governmental Organisations (IGO’s) that operate across many legal jurisdictions.
Thus, in December 2013, a working group of IGO’s, in close collaboration with CC, brought another so-called ‘ported’ Creative Commons licence suite to life. The effort was initiated and led by WIPO, the United Nations World Intellectual Property Organisation, and the working group includes not only ESA, but also other IGO’s such as CERN, UNESCO, the OECD, and the World Bank.
There are no differences between the standard CC licences and those of the IGO-ported equivalents in the ways that content is made available, only in the mediation and arbitration processes that are applied if the licence is violated. More information is available on the CC wiki.
With the licence suite now in force, it then falls to each IGO to implement it according to the materials they are making available and their specific needs. For example, CERN has started making images and some plots and graphs resulting from some of the Large Hadron Collider experiments available under CC licences.
Within ESA, we have now started implementation and intend to gradually introduce CC licencing for still and moving images to which ESA holds the full rights. As this is true for Rosetta’s NAVCAM images, these are among the first ESA works to be released this way.
In particular, we have chosen to go with the CC BY-SA 3.0 IGO licence, which allows sharing, tweaking, and remixing, even commercially, as long as credit is given as described above, and as long as any derivative works are also similarly licenced. We are also applying the licence to all NAVCAM images released to date, although it make take us a while to go back and change the credit lines for all of those images online.
In many ways, CC is similar to open source software licencing and is aimed at encouraging broad sharing of materials, whether original or derived from the original. Importantly, it is the licence used by Wikipedia and similar projects, important vectors for getting our images and other products into as many hands as possible.
Ultimately, we hope that our partners in scientific organisations and institutions throughout Europe and the world that also hold some of the rights to images and data taken by instruments paid for with national funding and flying on ESA spacecraft will also join us in releasing works this way: we are starting discussions on that now.
So why is it important for public organisations to support Creative Commons licencing? On one hand, the taxpayer funds the works created by those organisations and it seems perfectly reasonable that they be made available to the public in a timely, orderly fashion, while also recognising the rights of others involved in their creation.
And more philosophically perhaps, this quote from Creative Commons sounds very good to us:
“Our vision is nothing less than realising the full potential of the Internet — universal access to research and education, full participation in culture — to drive a new era of development, growth, and productivity.”
And, let’s be frank: we are, of course, also hoping for a wider dissemination of our content and a wider understanding of the amazing things we do at the European Space Agency.
.
Four-image mosaic of Comet 67P/C-G on 30 October. Credits: ESA/Rosetta/NAVCAM -CC BY-SA IGO 3.0
.
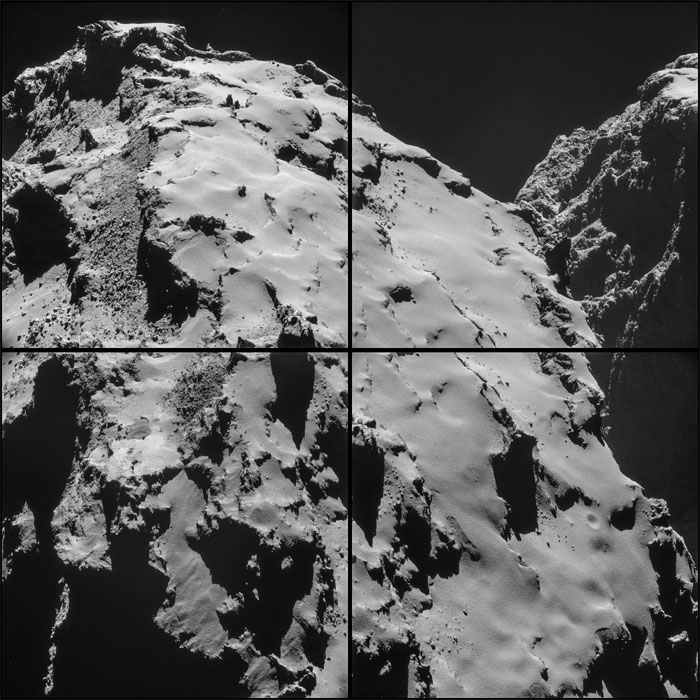
COMETWATCH 30 OCTOBER – ‘FAREWELL J’
While we wait for the announcement of Site J's new name (expected later today), the NAVCAM mosaic presented in this blog post shows the landing site as Rosetta left its 10 km orbit last week in order to prepare for the deployment of Philae on 12 November.
The mosaic comprises four individual NAVCAM images taken on 30 October when the spacecraft was 26.8 km from the centre of the comet. The image resolution at this distance is 2.27 m/pixel, and thus each 1024 x 1024 frame covers 2.3 km at the comet. The slightly cropped mosaic covers 4.0 x 3.7 km.
Even at this increased distance from the nucleus, the time between the four NAVCAM images means that it is difficult to make a completely accurate mosaic. Thus, as always, caution is needed in interpreting some features on the surface and faint emission around the nucleus. As usual, the four individual images are also provided.
The centre of the landing site is located roughly in the top centre, close to the horizon in this viewing angle; check against this image to help with orientation. The large depression that characterises the smaller lobe of the comet can be seen in the right-hand side at top right, while parts of the larger lobe can be seen in the lower half, with the still unseen portion of the comet again cast in dramatic shadow.
Note that with this post, we are now releasing all NAVCAM images under a Creative Commons licence (see the credit line), as explained in more detail in an accompanying blog post.
.
ESA_Rosetta_NAVCAM
.
ESA_Rosetta_NAVCAM
.
HELLO, AGILKIA
Eight days before Rosetta’s lander Philae is scheduled to touch down on Comet 67P/Churyumov-Gerasimenko, and a name has been chosen for the landing site: Agilkia.
The landing site, previously known as ‘Site J’, is named for Agilkia Island, an island on the Nile River in the south of Egypt. A complex of Ancient Egyptian buildings, including the famous Temple of Isis, was moved to Agilkia from the island of Philae when the latter was flooded during the building of the Aswan dams in the 20th century.
The name was selected by a jury comprising members of the Philae Lander Steering Committee as part of a public competition held 16–22 October by ESA and the German, French and Italian space agencies.
Agilkia was one of the most popular entries – it was proposed by over 150 participants. The committee selected Alexandre Brouste from France as the overall winner. As a prize, Mr Brouste will be invited to ESA’s Space Operations Control Centre in Darmstadt, Germany, to follow the landing live.
Although perhaps not quite as complicated as navigating Rosetta and Philae towards the comet, the task of choosing a name was by no means simple. More than 8000 entries from 135 countries were received in one week, showing great creativity and cultural diversity.
Thank you to everyone who entered!
.
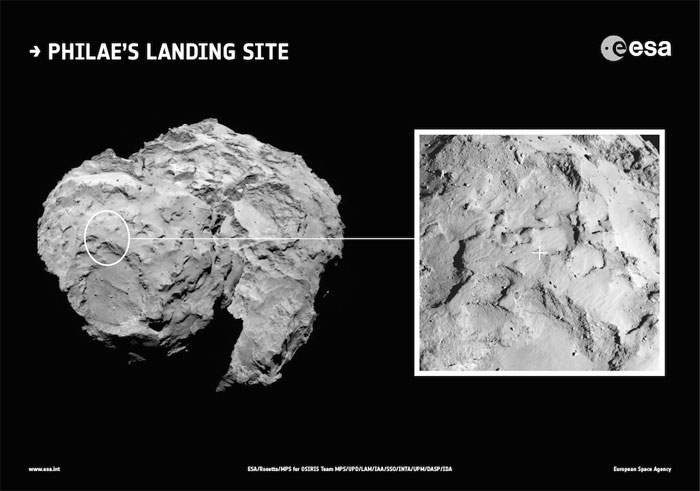
Agilkia, Philae's landing site on Comet 67P/C-G. Credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
Quelle: ESA
.
PUBLIC VIEWING ZUR KOMETENLANDUNG VON ROSETTA & PHILAE AM 12.11. IN DARMSTADT/CENTRALSTATION
.
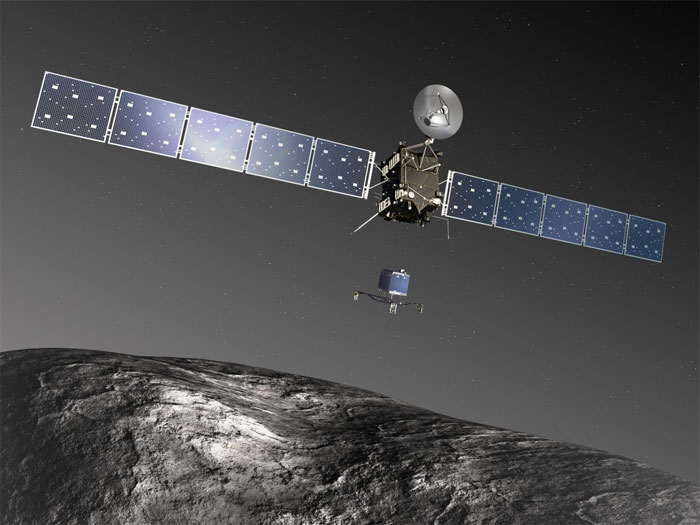
Rosetta und die Landeeinheit Philae am Kometen 67P/Tschurjumow-Gerassimenko
.
Raumfahrt- und Kometen-Fans sind herzlich eingeladen, am 12. 11. 2014 ab 16:00 h in der Centralstation Darmstadt an einer Live-Übertragung und öffentlichen Infoveranstaltung zur historischen Landung von Rosetta & Philae auf einem Kometenkern teilzunehmen.
Nach ihrer zehnjährigen Reise durch das Sonnensystem erreichte die ESA Mission Rosetta am 6. August den Kometen 67P/Tschurjumow-Gerassimenko. Der Landeplatz, der derzeit die Bezeichnung "J" trägt und sich auf der kleineren der beiden Kometenhälften befindet, wurde nur sechs Wochen nach der Ankunft Rosettas am Kometen ausgewählt.
Rosettas Landegerät Philae wird am 12. November um 09:35 Uhr MEZ in einer Entfernung von 22,5 km vom Kometenkern abgesetzt. Etwa sieben Stunden später soll Philae landen, wobei die Landebestätigung durch ESA-Bodenstationen gegen 17:00 Uhr erwartet wird. Erste Panorama-Bilder von der Oberfläche werden gegen 19:00 Uhr erwartet.
Rosetta-Missionsbetrieb aus Darmstadt geleitet

In die komplexen Landemanöver sind drei Zentren eingebunden: das federführende Rosetta-Missionsbetriebszentrum im Europäischen Satellitenkontrollzentrum ESA/ESOC in Darmstadt, das Philae Lander-Kontrollzentrum beim DLR in Köln und das Zentrum für den wissenschaftlichen Betrieb des Landers im französischen Toulouse.
In der Centralstation werden ESA-Experten aus dem Darmstädter Kontrollzentrum vor Ort über die bisherigen Highlights der Kometenforschung mit Rosetta berichten und in Echtzeit die Live ESA-TV Übertragung „von nebenan“ kommentieren sowie dem Publikum für Fragen zur Verfügung stehen.
Im Rahmen dieser Veranstaltung werden zudem die weitere Zukunft der Kometenforschung sowie die sog. „Weltraumlageerfassung“ (Space Situational Awareness) erklärt, mit der Europa noch effizienter in der Kometen- & Asteroiden-Beobachtung arbeiten und potentiellen Gefahren entgegenwirken will.
ROSETTA-LANDUNG – „PUBLIC VIEWING“
Programmablauf: Mittwoch, 12. November 2014, Centralstation, Im Carrée, 64283 Darmstadt
15:30h Centralstation öffnet für Besucher und Medien (Eintritt frei)
16:00h Start der Veranstaltung. „Ambition“ Sci Fi Movie-Clip als Intro-Teaser. Video zu Rosetta-Flugstrecke & Wissenschaftshighlights
Begrüßung: Dirk Wagner, Moderator & Raumfahrt-Journalist, Hessischer Rundfunk / HR Inforadio
16:10h Michael Khan, ESA Missionsanalytiker und Kometen-Experte: „Warum erforschen wir Kometen, auf der Suche nach dem Ursprung unseres Sonnensystems und ggf. sogar dem Leben auf der Erde?“
Letzte Manöver des Rosetta-Flugbetriebs in Darmstadt, letzte „Selfie“-Bilder aus dem All (inkl. erfolgter Philae Trennung ~ 09:35h / 1:4 Rosetta-Modell auf der Bühne)
ca. 16:30h ESA TV Live-Übertragung, Situation der Rosetta-Muttersonde und Status-Updates vom Philae Lander, auf dem Abstiegsweg zur Kometenoberfläche. Live-Kommentare aus den ESA-Kontrollräumen, Einschätzungen von Kometen-Wissenschaftlern, ESA-Management und Politikern.
ca. 17:00h GEPLANTE LANDUNG VON PHILAE auf der Oberfläche
17:30h – Fragen & Antworten mit Dirk Wagner (HR) und ESA-Experte Michael Khan
18:00h – 18:30h – PAUSE, Getränke und kleiner Imbiss in der Centralstation
18:30h Programm startet wieder. Wiederholung der Rosetta Highlight-Bilder des Tages.
Blick in die Zukunft mit ESA-Experte Dr. Gerhard Drolshagen: „Stellen Kometen- und Asteroiden evtl. eine Gefahr für die Erde dar? Ist der ‚Armageddon‘-Film reine Hollywood-Fiktion, oder…?“; weitere Details zum neuen ESA-Programm zur Weltraumlageerfassung (SSA).
ca. 19:00h/19:15h ESA-TV LIVE: Warten auf erste Panorama-Bilder vom Philae-Lander (CIVA-Kamera). Live-Updates und Infos aus dem ESA-Kontrollzentrum
ca. 19:30h – ESA-Experten Michael Khan und Dr. Gerhard Drolshagen kommentieren Ergebnisse live auf der Bühne. Weitere Fragen aus dem Publikum.
ca. 19:45h/20:00h – Abschluss des Events, Bühnenprogramm endet. Highlight-Bilder.
ca. 20:30h Centralstation schließt für alle Gäste
Live-Updates der Rosetta-Mission Online
Quelle: ESA
.
Update: 5.11.2014
.
COMETWATCH – 2 NOVEMBER
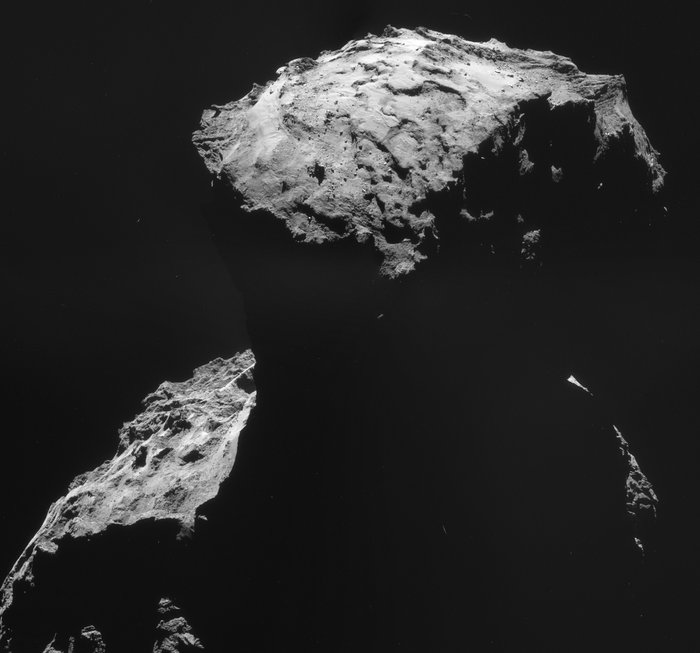
Enjoy this unusual NAVCAM view of the comet, seen at an angle which features the larger lobe of the comet. It connects the region containing the boulder Cheops in the lower-left, up and over the comet's neck, to the smaller lobe at lower-right.
.
Four image NAVCAM mosaic comprising images taken on 2 November. Credits: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0
.
The mosaic comprises four individual NAVCAM images taken from 33.4 km from the comet centre on 2 November. The image resolution is 2.68 m/pixel and thus each original 1024 x 1024 pixel frame measured 2.7 km across. The mosaic has been slightly rotated and cropped and covers 4.1 x 4.1 km: some contrast enhancement has been applied.
As always, rotation of the comet and movement of the spacecraft as the sequence of images was taken means that there are slight changes in illumination and perspective from one to the other, so the mosaic may not be perfectly accurate.
.
Quelle: ESA
.
Update: 6.11.2014
.
WIR HABEN ROSETTAS SEGEL AUS DEM WIND GEDREHT
.
Rosetta-Flugdirektor Andrea Accomazzo
.
Andrea Accomazzo ist Flight Director der Rosetta-Mission, er leitet das momentan 70-köpfige Expertenteam am ESOC-Zentrum in Darmstadt. Der Raumfahrt-Ingenieur hat uns erklärt, wieso das Steuern einer Kometensonde manchmal einem Segelschiff ähnelt.
Herr Accomazzo, Sie leiten am Darmstädter ESOC die Abteilung für Solar- und Planetar-Missionen. Für die Kometenmission Rosetta fungieren Sie als Flight Director, wenn es also um die Steuerung der Sonde vom Kontrollraum geht, haben Sie das letzte Wort. Rosetta hat sich in den vergangenen Wochen immer näher an den Zielkometen 67P/Churyumov-Gerasimenko herangepirscht, sie überflog dessen Oberfläche näher als Passagierflugzeuge über der Erdoberfläche unterwegs sind. Dabei wird die Raumsonde von Ihrem Team am ESOC-Zentrum in Darmstadt manövriert. Wie ist es, einem so bizarren Himmelskörper so nahe zu kommen?
Ja, 67P hat uns durch seine Gestalt überrascht. Die Aufnahmen von Rosettas Bordkameras zeigen, dass er sehr seltsam geformt ist. Sein Kern, der etwa vier Kilometer groß ist, hat keinerlei Ähnlichkeit mit einer Kugel, sondern besteht aus zwei unförmigen Teilen, die über eine Art Hals verbunden sind.
Wie ist es möglich, im unregelmäßigen Schwerefeld eines solchen Körpers zu manövrieren?
Wir haben uns schrittweise dem Kometenkern angenähert - und dabei hatten wir Zeit, ihn kennenzulernen. Als wir am 6. August rund 100 Kilometer entfernt am Kometenkern eintrafen, waren wir noch zu weit weg, um von dessen schwachen Schwerefeld eingefangen zu werden. Zu diesem Zeitpunkt wussten wir noch zu wenig über dessen Schwerkraft.
Wir haben deshalb einen sogenannten hyperbolischen Orbit um den Kern eingeschlagen. Auf diesem Orbit konnten wir bereits erste Messungen der Schwerkraft des Kometen durchführen - die Basis zur Planung der späteren Umlaufbahnen. Dass erforderte aber immer wieder Bahnkorrekturen, ansonsten hätten wir uns wieder vom Kern entfernt. Im Laufe der Zeit haben wir uns dann weiter angenähert. Schließlich, am 10. September, waren wir nur noch 30 Kilometer entfernt. Das war nahe genug für einen gebundenen Orbit, also eine echte Umlaufbahn.
Doch auch das reichte uns nicht, wir wollten noch näher ran, das war für die Auswahl des Landeplatzes wichtig. Schrittweise haben wir die Bahn also weiter abgesenkt - ab dem 15. Oktober umkreisten wir das Zentrum des Kometenkerns in 10 Kilometern Abstand, das war also nur noch 7,5 bis 8 Kilometer von seiner Oberfläche entfernt. Jetzt spürten wir auch die seltsame Gestalt des Kometen. Einerseits spielte dessen unregelmäßiges Schwerefeld nun eine größere Rolle, anderseits hatten wir inzwischen aber auch viel über 67P gelernt - das half uns beim Manövrieren. So nah wie in dieser Phase werden wir dem Kometen wahrscheinlich nicht nochmal kommen, eine gute Gelegenheit, um sein Gravitationsfeld zu vermessen. Das erfordert aber immer wieder Bahnkorrekturen, um die Umlaufbahn zu halten. Wir nutzten dafür jede mögliche Gelegenheit.
Kometen, die sich auf dem Weg zur Sonne erwärmen, spucken Staub und Gase ins Weltall.
Wie beeinflusst dieser Gegenwind die Bewegung der Sonde?
Stimmt, das trifft auch auf 67P zu. Während der Annäherung stellten wir fest, dass Gas vom Kometen ausgeht, es übt beständig eine aerodynamische Kraft auf Rosetta aus. Auch wenn diese nur ein Prozent der Anziehung des Kometenkerns ausmacht, so kann man diese Kraft keinesfalls ignorieren. Denn ein Fehler dieser Größe summiert sich mit der Zeit auf. Würde man das unberücksichtigt lassen, wäre die räumliche Position zwischen Sonde und Komet schon bald nur noch sehr ungenau bekannt.
Was haben Sie dagegen unternommen?
Wir haben es gemacht wie beim Segeln: Rosetta wurde von uns in eine spezielle Bahnebene gelenkt, wo sie ihre großen Solarzellenflächen so ausrichten kann, dass lediglich deren Kante vom Gas des Kometen getroffen wird. Damit haben wir die Solarzellen, die wie Segel wirken, sozusagen aus dem Wind gedreht. Trotz der engeren Orbits konnten wir so die Bahnstörung, die von der kometaren Aktivität ausgeht, deutlich reduzieren. Wir lernen also immer besser am Kometen zu manövrieren, und zwar während wir dies vor Ort bereits tun!
Quelle: DLR
.
Update: 23.30 MEZ
.
INTO THE SHADOWS OF COMET 67P/C-G
Based on latest images and information provided by the OSIRIS team
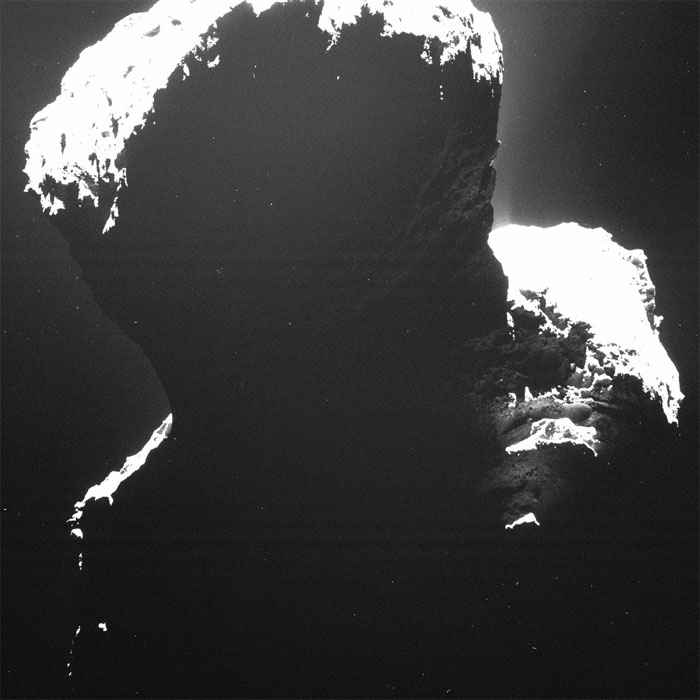
The OSIRIS team has been taking advantage of their camera’s high dynamic range in order to gather information from regions of Comet 67P/Churyumov-Gerasimenko that on first impressions appear to be in total darkness.
Quick recap from the OSIRIS team: unlike standard cameras that encode information in 8 bits per pixel and can thus distinguish between 256 shades of grey, OSIRIS is a 16-bit-camera. This means that one image can comprise a range of more than 65000 shades of grey – much more than a standard computer monitor can display. In this way, OSIRIS can see black surfaces darker than coal together with white spots as bright as snow in the same image. (See also our related post: NAVCAM’s shades of grey).
.
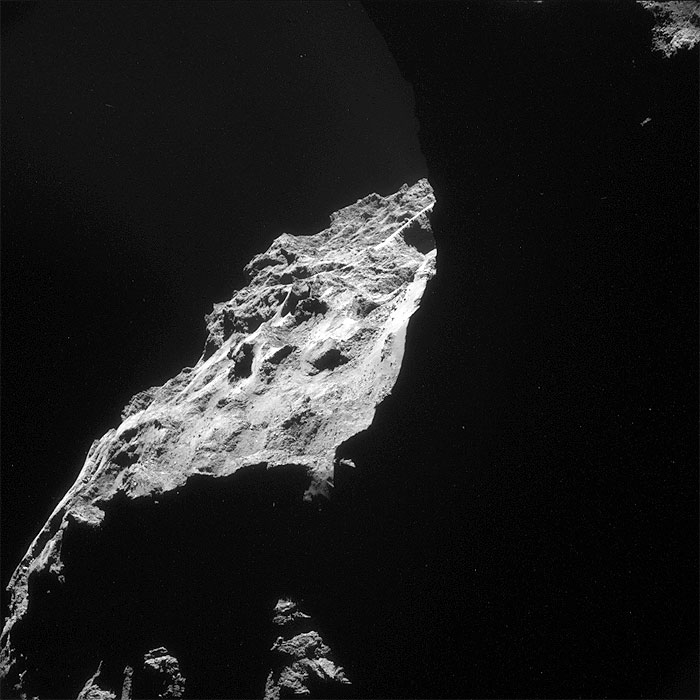
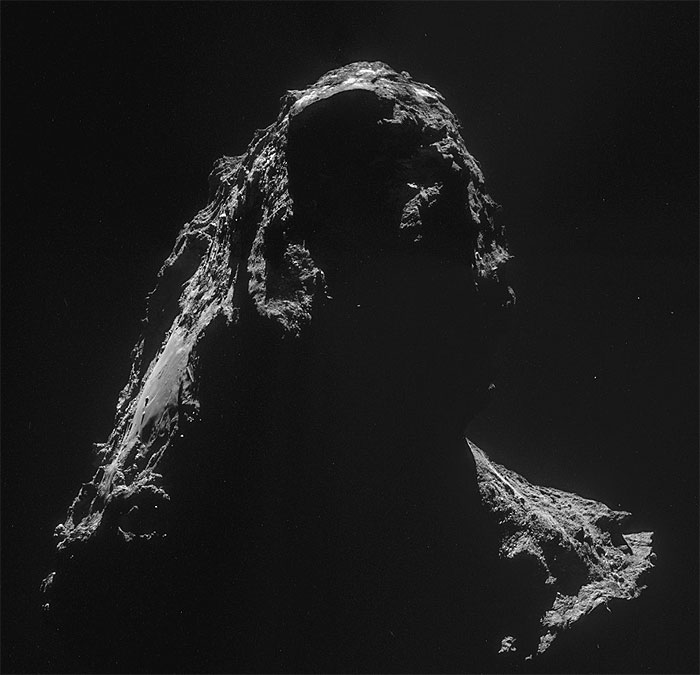
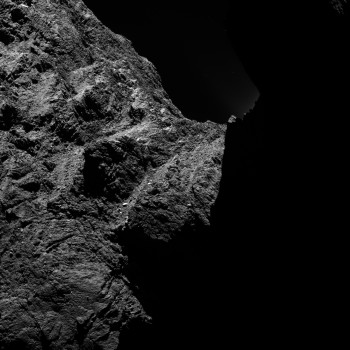
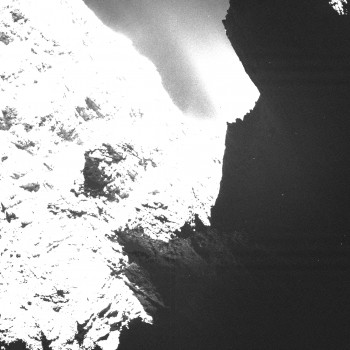
Above: An image of Comet 67P/Churyumov-Gerasimenko obtained on 30 October 2014 by the OSIRIS scientific imaging system from a distance of approximately 30 kilometres and displayed with two different saturation levels. While in the left image the right half is obscured by darkness, in the right image surface structures become visible. The image scale is approximately 0.5 metres/pixel, so the images measure about 1.1 km across. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/ INTA/UPM/DASP/IDA.
When a region of the comet is imaged in shadow, the light scattered from dust particles in the comet’s coma can offer some illumination, in combination with some adjustment of the saturation levels of the image. The first two images included in this post (above), taken on 30 October by the OSIRIS narrow-angle camera from a distance of approximately 30 kilometres illustrate this technique. They show the same portion of the comet but are displayed with two different saturation levels: while in the first image the right half is obscured by darkness, in the second image surface structures become visible.
The team also managed to get a glimpse of the as yet unseen southern side of the comet on 29 September, when Rosetta was completing the 'night-time' excursion reported on previously. This part of the comet is, at the present time, facing away from the Sun, making it impossible to determine shape and surface structures. This is because the comet’s rotation axis is not perpendicular to its orbital plane but is tilted, and so parts of its surface can at times remain in total darkness – comparable to the weeks of complete darkness in Earth’s polar regions.
.
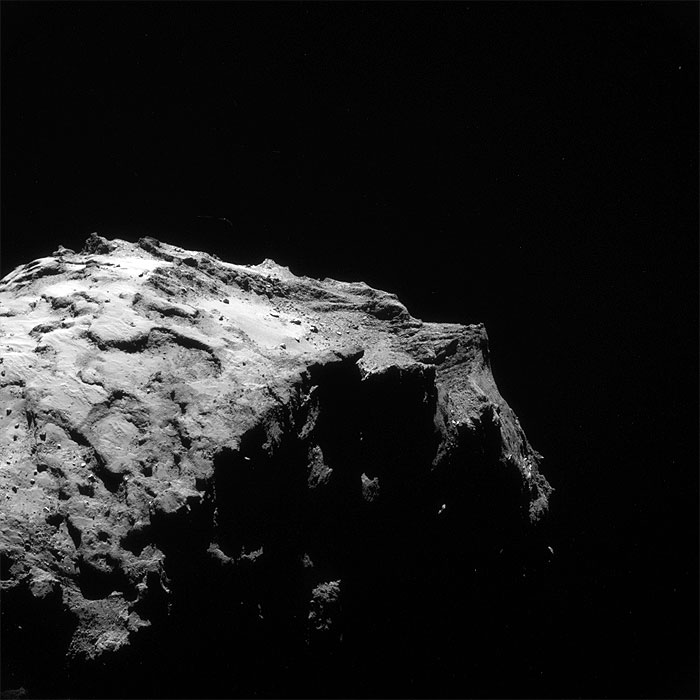
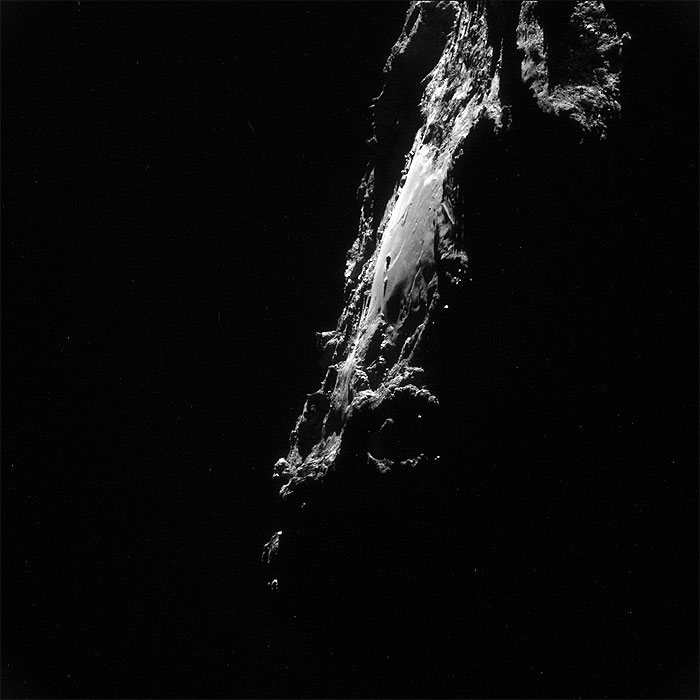
A rare glimpse at the dark side of Comet 67P/Churyumov-Gerasimenko. Light backscattered from dust particles in the comet’s coma reveals a hint of surface structures. This image was taken by OSIRIS, Rosetta’s scientific imaging system, on 29 September 2014 from a distance of approximately 19 kilometres. The image scale is approximately 1.7 metres/pixel, so the frame measures about 3.5 km across.
Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA.
But light backscattered from dust particles in the comet’s coma reveals a hint of surface structures in this mysterious region, although as you can see from the image, much of it still remains in total shadow – for now.
This ‘dark side’ promises to hold the key to a better understanding of the comet’s activity – once the comet draws closer to perihelion next year (perihelion is 13 August 2015, when the comet will be 186 million kilometres from the Sun – roughly between the orbits of Earth and Mars). Then the comet’s southern side will be fully illuminated and subjected to especially high temperatures and radiation. As a result, the OSIRIS scientists believe this side to be shaped most strongly by cometary activity.
In addition, once the details of this side of the comet are known, then parameters such as mass, volume and density can be further refined.
Quelle: ESA
-
ROSETTA LINED UP FOR LANDER DELIVERY
Rosetta conducted an important manoeuvre this morning that shifted it onto the orbit it will maintain until 12 November, when Philae is set for dispatch to the surface of comet 67P/C-G.
The thruster burn took place starting at 02:09:55 UTC (03:09:55 CET), ran for 90 seconds and, based on an initial analysis of spacecraft radiometric data, delivered a delta-v – change in speed – of 9.3 cm/sec, as confirmed by the Rosetta Flight Dynamics team.
It was the second and final of two ‘deterministic’ (i.e. direction and thrust are prepared in advance) manoeuvres that moved Rosetta onto the planned lander delivery orbit, now at a height of about 30 km, which will be maintained right up until the pre-delivery manoeuvre at two hours before separation at 08:35 UTC (09:35 CET) on the morning of 12 November.
Note that mission control team at ESOC expect to conduct some additional, minor 'touch-up' burns between now and then just to maintain Rosetta on this orbit; these will not significantly change the orbit.
It’s also interesting to note, as mentioned by mission scientist Matt Taylor, that this moves Rosetta away from the closest bound orbits (10km) we will ever achieve during the mission.
“From now on, the closest distances we will achieve will be via flybys to provide the science instruments on the orbiter the closest look at the comet.”
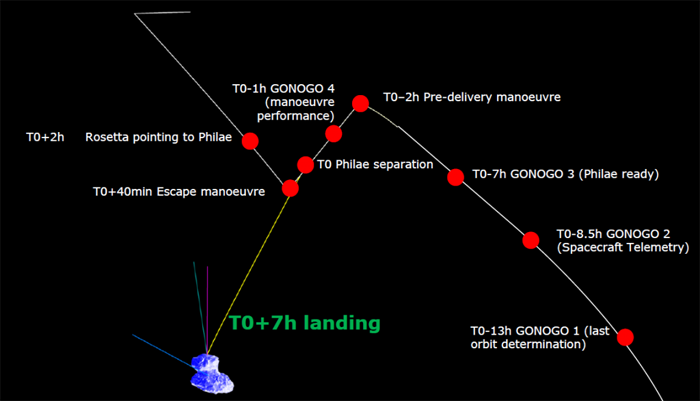
As mentioned, the next planed orbit-changing manoeuvres will occur on the 12th at (a) 2 hours before separation and (b) about 40 minutes after (see animation below), in between which Philae will be released.
The pre-delivery manoeuvre will shift Rosetta's trajectory so that the orbiter would be on a path so as to pass over the comet at a distance of 5 km, while the separation will occur at 08:35 UTC on board the spacecraft about 22 km (the confirmation signal will arrive on Earth at 09:03 UTC).
The second manoeuvre will cause a deflection of the Rosetta trajectory away from the comet; it will occur 40 minutes after separation, and help guarantee visibility of Philae at touchdown.
Lined up for lander delivery
All in all, today’s burn means that the mission is lined up for lander delivery!
One of the questions frequently posted here in the blog (and via other channels) asks about the delivery height. Why is it set for 22.5km?
We passed the query to Rosetta Flight Director Andrea Accomazzo at ESOC, and he provided the answer below, with inputs from Vicente Companys from the Flight Dynamics team.
There were many constraints to take into account when designing a viable descent trajectory for Philae.
These constraints refer to minimum comet distance of Rosetta, performance of Rosetta, performance of Philae, requirements for touch-down conditions, attitude constraints of Rosetta, safety margins, etc.
The accuracy of the landing does not depend on the distance to the comet, but rather is a combination of the position and velocity errors of Rosetta at the last time its orbit is controlled (two hours before separation in the selected strategy) and their propagation up to touch-down time.
Flying closer to the comet is not necessarily more accurate than further away; thus initial navigation errors and time to touch-down have to be accurately balanced.
Further to this, the selected separation strategy foresees a fixed separation velocity of approximately 0.187 m/s. This imposes limitations on the capability of directing Philae towards the comet, i.e. it restricts the domain of possible positions and velocities for Rosetta at the time of separation.
If Rosetta were to release Philae from any closer distances, then it would have to fly with lower velocity to be able to direct Philae towards the comet (and still maintain the minimum safety distance). By reducing the velocity of Rosetta, however, we would have two negative effects:
• Rosetta would not fly on an hyperbolic trajectory with respect to the comet; therefore the spacecraft would potentially fly towards the night side of the comet, which we want to prevent
• The time from last orbit control manoeuvre to touch-down would increase, thus increasing the time over which navigation errors would propagate, affecting landing accuracy
In preparing the delivery operation, several options were analysed and the selected one is the one giving the best results in terms of landing accuracy and fulfilment of constraints.
In summary:
• Rosetta will start off on a slightly elliptical orbit at about 30 km distance from the comet centre
• About two hours before separation, a manoeuvre will move Rosetta onto an hyperbolic orbit flying in front of the comet and with a miss-distance of about 5 km from the comet centre
• Forty minutes after Philae separation, when Rosetta is at about 20 km distance from the comet, another manoeuvre will move Rosetta away from this orbit and move it to a region that guarantees visibility of Philae at touch-down
.
Quelle: ESA
6382 Views