
30.10.2025
The USC Department of Astronautical Engineering (ASTE) is expanding its focus on space robotics, with an emphasis on autonomous systems that can operate in extreme and unmapped environments.

AUTONOMOUS EXTREME ENVIRONMENT MOBILITY, LIKE THE FIRST MODEL PREDICTIVE CONTROLLER TO BE RUN ON THE MOON CO-DEVELOPED BY LASER PI KEENAN ALBEE, IS ESSENTIAL TO EXPLORATION, ENVIRONMENTAL MONITORING AND MORE (COLLABORATORS: JHU, NASA/JPL)
Many robotics systems function in conditions where the environment is well-defined: factory floors, urban roads, research facilities. But what about robots designed for space?
Keenan Albee, who recently joined the ASTE faculty as an assistant professor, has developed robots that have been trialed aboard the International Space Station (ISS) and are due to fly to the Moon. His USC lab – the Laboratory for Autonomous Systems and Exploration Robotics (LASER) – focuses on autonomous systems that can navigate and make decisions in extreme environments where prior information is limited and predictions may be unreliable.
“How can our mobile robotic systems go to places where they can’t yet operate – on the Moon, in microgravity?” said Albee. Planetary surfaces pose problems of uncertain topography, limited sensor coverage and high cost of failure. In addition, when it comes to developing robots for performing servicing tasks in space, potential communication glitches prevent real-time teleoperation.
“In many cases, we don’t have complete maps of the places we’re trying to navigate,” said Albee. “For instance, the satellites that image the lunar surface can only capture part of the resolution. That means that the robots we send to the Moon will need to be capable of exploring the surface independently, responding to environments and gathering data on the move.”
The future of space exploration will depend less on real-time human oversight and more on autonomous machine intelligence. This emphasis is reflected by trends in the rapidly growing commercial space industry.
“Small startup companies are now able to leverage ideas that have been latent within astronautical research for years,” said Albee. “Reduced launch costs and unprecedented advancement in computational capacity is giving private investors the confidence to fund more ambitious projects in space robotics.”
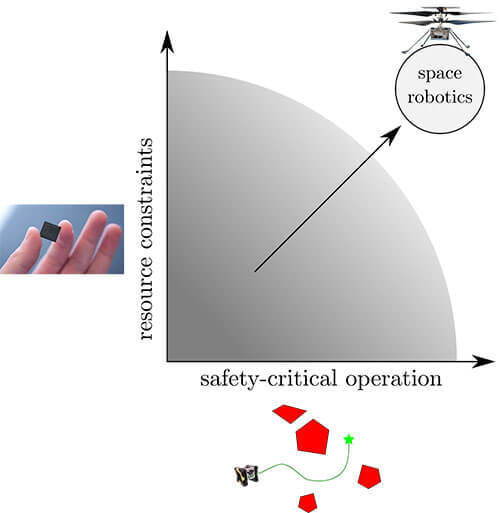
EXTREME ENVIRONMENT ROBOTICS SITS AT THE FOREFRONT OF CONSTRAINED, SAFETY-CRITICAL OPERATION. LASER’S WORK CENTERS ON SOLVING AUTONOMY PROBLEMS AT THESE EXTREMES, FOR SPACE ROBOTICS AND BEYOND
This is particularly true of microgravity robotics, an area where the USC Space Engineering Research Center (SERC) has made important contributions in recent years.
“Our work designing, testing and deploying robotic systems for microgravity includes projects that have been tested on the ISS,” said Professor David Barnhart, director of SERC. “CLINGERS, USC’s first experimental payload, is a docking system designed for rendezvous and proximity operations in space. REACCH, developed in collaboration with the NASA Jet Propulsion Laboratory, is a robotic gripper developed for space environment applications, especially debris removal.” Other significant SERC projects include LEAPFROG, a system to simulate the flight dynamics of lunar descent and landing, and the center has also launched three CubeSats, or nanosatellites.
LASER will collaborate closely with SERC on microgravity robotics projects, with a focus upon in-space servicing, assembly, and manufacturing (ISAM). One example is the Optical-Reef project to build a large diameter telescope, and USC’s partnership with the Astrobee platform.
“Optical-Reef addresses a problem that has perplexed astronautical engineers for decades,” said Barnhart. “There’s a limit to the size and weight of any rocket payload, so on-orbit manufacture and assembly can dramatically expand the possibilities of what can be built in space. A telescope serves as a good test case for large-scale, complex structures – the wider the diameter of the telescope, the more you can observe, the better the resolution and the further into space you can see.”
The autonomous, multi-agent assembly technology developed for Optical-Reef could also apply to building and servicing other on-orbit structures – from microsatellites to entire space habitats.
“These applications would be a lot more cost-effective because you wouldn’t have to pre-assemble materials or de-orbit your satellite every time it breaks,” Albee explains. “Both Professor Barnhart and I are very interested in what’s known as ISAM (In-Space Servicing, Assembly, and Manufacturing). Over the coming year, LASER and SERC will be establishing complementary hardware testbeds as well as working together on establishing industry and research partnerships.”
These opportunities to align academic research with commercial space applications was an important factor informing Albee’s decision to join ASTE, having previously held a research role as a robotics technologist in the Maritime and Multi-Agent Autonomy group at the NASA Jet Propulsion Laboratory.
“Microgravity robotics and planetary surface robotics, key research pillars for LASER, are subsets of our broader interest in extreme environment systems,” said Albee. “This includes maritime robotics and aerial robotics (such as drones for environmental monitoring). Each share commonalities in the type of problems encountered, but with very different applications for the algorithms developed.”
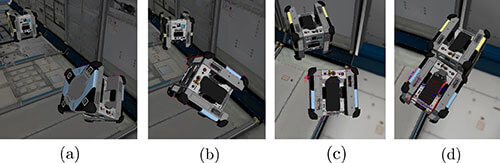
IMAGES FROM THE FIRST AUTONOMOUS RENDEZVOUS WITH AN UNCHARACTERIZED TUMBLING TARGET, A COLLABORATION BETWEEN LASER AND RESEARCHERS AT MIT AND DLR
Albee’s arrival at USC demonstrates ASTE’s investment not only in space robotics, but also in leveraging the rapid growth in research and development across the field of autonomous robotics more generally – innovations that are equally transferable to robotics for space exploration.
In establishing LASER, Albee will also be drawing upon the expertise of leading roboticists and interdisciplinary researchers, many of whom are part of the USC Robotics and Autonomous Systems Center (RASC). A key collaborator is Feifei Qian, WiSE Gabilan Assistant Professor of Electrical and Computer Engineering, who specializes in analyzing and modelling the complex interactions between robots and their locomotion environments.
“There are so many niche areas of expertise we can draw from,” said Albee. “So far, I’ve loved interacting with the researchers at RASC, as well as with the students I’ve met through my course on optimal control and reinforcement learning.”
From Albee’s perspective, USC Viterbi’s positioning at the nexus of academia and industry is another key advantage. “At ASTE, we’re poised to leverage the engineering ecosystem across Los Angeles, backed by the aerospace legacy of Southern California and the current boom in space industry startups,” he added. “As a space roboticist, I couldn’t wish for a better place to land.”
Quelle: USC Viterbi