
.
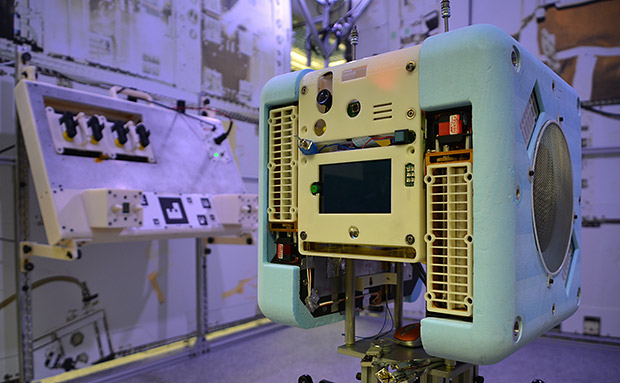
Photo: Evan Ackerman/IEEE SpectrumNASA's Astrobee is a new generation of free-flying robots designed to help astronauts on board the International Space Station.
Since 2006, NASA has had a trio of small, free-flying robots on board the International Space Station. Called SPHERES (Synchronized Position Hold Engage and Reorient Experimental Satellites), these robots have spent about 600 hours participating in an enormous variety of experiments, including autonomous formation flying, navigation and mapping, and running programs written by middle school students in team competitions. But beyond serving as a scientific platform, SPHERES weren’t designed to do anything especially practical in terms of assisting the astronauts or flight controllers, and it’s time for a new generation of robotic free fliers that’s fancier, more versatile, and will be a big help for the humans on the ISS.
This is Astrobee.
Last fall, IEEE Spectrum visited NASA Ames Research Center in Mountain View, Calif., to have a look at the latest Astrobee prototype and meet the team behind the robot.
Small, versatile, and autonomous, Astrobee will be getting to work on the ISS
Astrobee is a cube about 32 centimeters on a side. Each corner and most of two sides are covered in a soft bumper material, with a propulsion system embedded in it. The central part of the robot contains sensors, control systems, a touchscreen, and several payload bays for adding hardware, including an arm designed to grab onto ISS handrails.
While the robot is designed to fly freely on board the ISS, for testing on the ground, Astrobee is mounted on top of a sled that uses a jet of CO2 to create a low-friction air bearing above a perfectly flat (and very enormous) block of granite. This allows the researchers to simulate microgravity in two dimensions to test the robot’s propulsion and navigation systems, but once it’s up in space, the entire robot will consist of just the cube that’s defined by the blue bumpers, without all of the stuff underneath it.
From SPHERES to Cubes
From the beginning, Astrobee was intended to be much more than a successor to SPHERES: It’s a completely new platform, designed from scratch to operate autonomously and safely on board the ISS. One of the biggest improvements is the propulsion system. While SPHERES require constant astronaut supervision (because they’re slightly flammable, among other reasons) and rely on disposable alkaline battery packs and tanks of CO2propellant to function, Astrobee has an electrically-powered propulsion system, and it can recharge itself on a dock. NASA says Astrobee will be able to make its way around the ISS either under direct remote control from the ground or completely by itself. With modular bays designed to accept customized hardware, the robot can perform a variety of tasks, in some cases taking over boring “housekeeping” jobs from human astronauts.

Photo: NASA/ISSNASA astronaut Scott Kelly works with SPHERES on the International Space Station.
Astrobee is fundamentally different than SPHERES in that it’s designed from the ground up to operate exclusively inside the ISS. “We’re an IVA [intra vehicular activity] free flier, so we’re flying around on the inside of the International Space Station with the crew,” Trey Smith, lead systems engineer for the Astrobee Project at NASA’s Intelligent Robotics Group tells us. In contrast, SPHERES was designed around a CO2 propulsion system that could theoretically operate not only inside but also outside of the station in the vacuum of space—though that would have required some upgrades to the SPHERES platform.
Since Astrobee can rely on having an atmosphere around it, it can move itself by pushing air in specific directions, the way most things that fly here on Earth do. There are all kinds of ways of making this work, but operating safely in microgravity comes with an intimidating number of unique challenges, which led to Astrobee’s fairly complicated—and absolutely fascinating—propulsion design.
Safe Propulsion
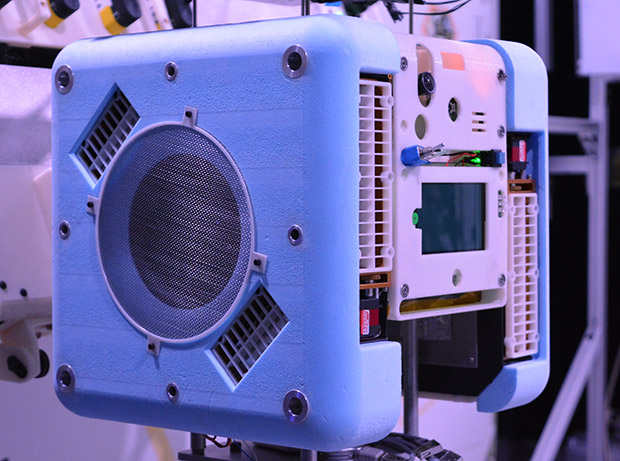
Photo: Evan Ackerman/IEEE SpectrumSide view of Astrobee showing one of the propulsion module.
On two faces of Astrobee, behind a protective screen, there’s an impeller: A big fan that sucks in air. The impellers, which counter-rotate with each other to minimize gyroscopic forces, are constantly generating a pressurized pocket of air inside of the robot, which is directed out of steerable nozzles on each face. If all of the nozzles are closed, Astrobee doesn’t move, and opening them individually or in combination generates thrust, which moves the robot in the opposite direction.
“There are twelve nozzles, and they’re carefully arranged so that all of them are off-center,” Smith explains. “If you ever have one thruster that goes crazy, you’re going to wind up flying around in circles, not accelerating across the space station. But if you use a pair of thrusters, then you get a balance. There are different pairs that give you pure translation or pure rotation in each of the cartesian axes in both plus and minus directions, and that shows you that you can get any kind of directional thrust you want.”
Astrobee will be able to make its way around the ISS either under remote control from the ground or completely by itself, performing a variety of tasks and in some cases taking over boring “housekeeping” jobs from astronauts.
NASA is understandably somewhat nervous about the idea of a robot that can generate its own thrust and move autonomously around the ISS. Off-center thrusters are just one way that Astrobee is designed to be safe: All of its moving parts are internal, meaning that an astronaut can safely grab it anywhere, and each corner is rounded and cushioned in soft foam, minimizing potential damage if it runs into anything.
“We’re flying anywhere on station,” says Smith. “If we run into something, we could run into practically anything.” The ISS windows turn out to be a very big issue: “Astrobee is kind of like a big fluffy bowling ball, in terms of the mass, and we’re having to be very conservative about the amount of force we could potentially apply if we have a collision. The typical window on the ISS has four layers of glass: two of them are the pressure panes, and then on the inside and on the outside are what are called the scratch and debris panes respectively. What we’re trying to prove is that there’s no way we could break the scratch pane.”
Astrobee has to be hardware safe on a fundamental level. In other words, if all of the software goes haywire in the worst way possible, the robot must not be able to cause critical damage to the station. To fully address the safety concerns of an out-of-control robot, the Astrobee team has had to imagine an absolute worst case scenario, and it’s this: A software glitch causes the robot to accelerate as fast as it can, along the entirety of the longest straight line distance on the ISS (about 20 meters), directly into one of the station’s windows. At that point, the robot would be moving at about 2 meters per second, much faster than its software-limited top speed of 0.75 m/s. “It’s possible that we could break the scratch pane, but we wouldn’t be able to do worse than that. No critical damage,” Smith says.
Payloads, Sensors, and Brains
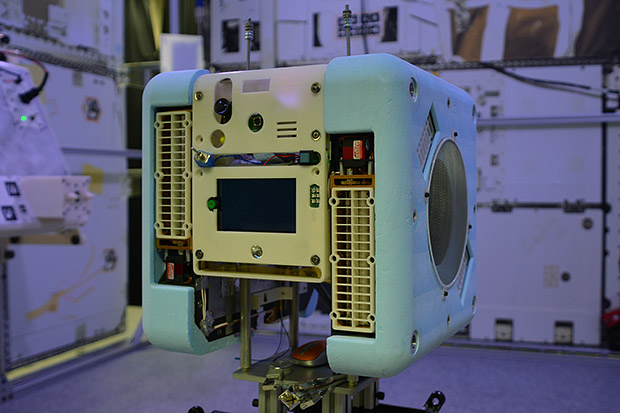
Photo: Evan Ackerman/IEEE SpectrumAstrobee’s front face, showing its cameras, sensors, and touchscreen.
Between the propulsion modules on each side of Astrobee there’s plenty of room for all the sensors and computing hardware the robot needs to operate autonomously, with enough left over to host a diverse array of payloads. The top and bottom thirds of the robot are payload bays (two in front and two in back), each with mechanical, data, and power connections. The top payload bay in the front is currently taken over with Astrobee’s own navigation sensors, but having open payload bays was a priority for Astrobee, according to Smith. “The way we do the payloads really came out of our experience with SPHERES: At first, SPHERES were mostly for testing formation-flying software, but then people realized you could attach payloads, and they went crazy with it,” he says. “So we invested a lot more effort in thinking out how to do that with Astrobee.”
Astrobee’s computing system has three layers of processors inside: one low level, one mid level, and one high level. The mid and high level processors are identical, except that the mid level is running Linux and taking care of most of the robot’s core functionality, while the high-level processor is running Android and is dedicated to the payload. This keeps the science payload nice and isolated, while also making Astrobee relatively easy to program, since you can just write Android apps that interface with Astrobee through a broad API.
Astrobee’s sensor suite consists of a primary navigation camera with a 116° field of view, along with an HD autofocusing camera that can stream video from the ISS down to the ground in real time. There’s also a CamBoard Pico Flexx time-of-flight flash IR 3D sensor that can detect obstacles out to about 4 meters (although it’s not mounted in the prototype we saw), and an optical-flow detector mounted on Astrobee’s top face that detects velocity and will cut off the motors if the robot starts moving too fast.
Two more cameras looks behind the robot to assist with obstacle avoidance, docking, and perching (more on that in a bit). Powering everything (including the propulsion system) are lithium-ion batteries, which can be quite dangerous, but fortunately for the Astrobee team, they weren’t the first group to use lithium-ion on station, so there are already accepted safety procedures in place that they can follow. The robot should be good for a few hours of flight time before it has to recharge.
Autonomous Navigation
One of the things that makes Astrobee unique and valuable is that it’ll be able to navigate autonomously around the U.S. module of the ISS, as well as in the ESA and JAXA modules (not the Russian segment). Astrobee has one major thing going for it in this regard: The ISS is a highly structured environment. It’s a compact, well defined, and predictable area, and unless something goes horribly wrong, things like darkness or rain aren’t a factor. With this in mind, the robot will be using a relatively simple (in principle, at least) system to localize itself, matching features that a single monocular camera sees with a map of the interior of the ISS, as Smith explains: “We have a prior map, so with a single frame of video, we should be able to see the landmarks from our prior map, recognize them, and say, okay, we’re here on the station.”
A problem that’s unique to a space robot is navigating around humans where there is no established up or down. “With our current maps we pretend that there’s gravity, so the top of the robot always points overhead, and you can kind of imagine we’re driving around like a car,” says Smith. As it turns out, the ISS does have a “ceiling” (called the overhead) as well as a “deck” that the astronauts tend to use, defined at least in part by which way the lighting is oriented. Astrobee will likely try to maintain a fixed distance from the ceiling as it navigates, to keep from being accidentally stepped on or kicked. Initially, Astrobee will be able to detect obstacles (like astronauts) and stop, but not replan around them, and NASA plans to gradually improve Astrobee’s autonomous navigation capabilities over time.
Of course, all of Astrobee’s autonomy is optional, and being able to teleoperate it from the ground is an important feature, both in terms of allowing controllers to direct the robot when necessary and making sure that a human can take over if Astrobee’s autonomy somehow fails. This kind of adjustable autonomy makes the robot much more efficient and versatile, since controllers can issue commands at any level, although it’s expected that a human (somewhere) will always have supervisory control. And if all else goes wrong, the crew can always step in and manhandle the robot back to its dock.
A Cozy Dock on the ISS
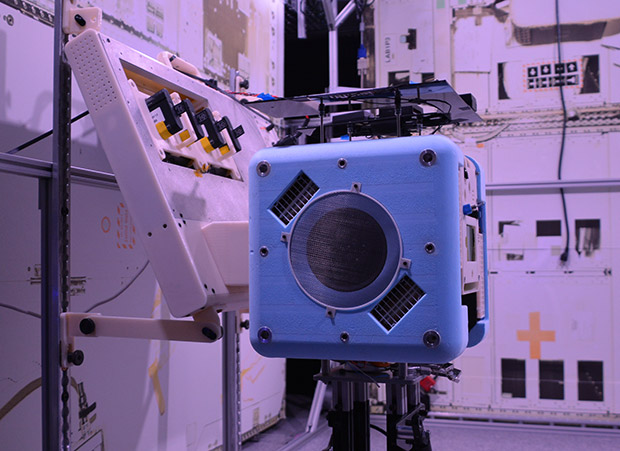
Photo: Evan Ackerman/IEEE SpectrumAstrobee on its dock.
When it’s not flying around the ISS being very busy and important, Astrobee will have a cozy home on a customized dock. The dock is connected to the station for power and basic telemetry, and includes some fiducials to make it easy for Astrobee to see. There are two berths on each dock, and Astrobee can dock by itself, using its rear-facing camera to back up onto the dock. Once it’s close enough, magnets will engage to hold it there, and the dock has to be instructed to retract the magnets before the robot can fly off again.
This Robot Is Armed
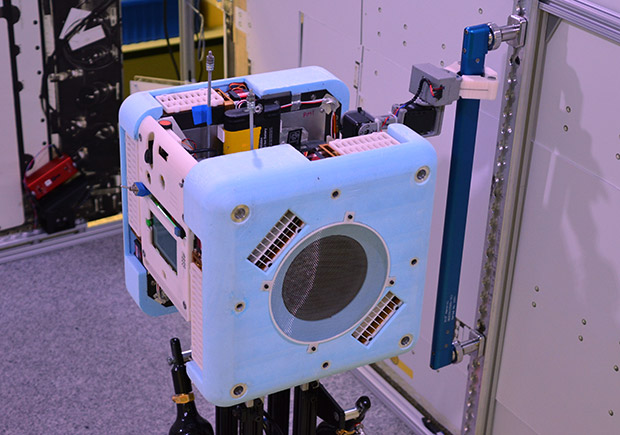
Photo: Evan Ackerman/IEEE SpectrumAstrobee using its arm to perch on a handrail.
Whenever Astrobee isn’t actively traveling somewhere, it’ll need to keep itself from floating away, and to do that, it has an adorable little 3D-printed perching arm that was designed by NASA Ames systems engineer In Won Park. The arm spends most of its time retracted into Astrobee’s upper rear payload bay, but it’ll unfold itself on demand. Using the rear camera, the arm can locate and grab onto the same standardized handrails that astronauts use to get around and hold themselves in place. By using the perching arm to keep Astrobee stationary rather than running the impellers, the robot’s battery life can be extended by up to 80 percent. Once perched, the arm’s motors can be used to pan and tilt the body of the robot, which is exactly what you’d need for a remote video camera.
The gripper on the arm is a collaboration between NASA Ames and Columbia University’s ROAM Lab, under the direction of Matei Ciocarlie, who developed the Velo gripper at Willow Garage. The gripper is mechanically compliant, and calibrated to be able to hold Astrobee securely, but not so securely that an astronaut can’t pull the robot free if they need to, since the arm is programmed to power down once it detects a force above a certain threshold. This is also a safety feature: If the robot is secured to a rail and someone runs into it by accident, it’ll just let go and float away.
While the primary purpose Astrobee’s arm is perching, NASA says researchers could develop custom grippers to do a variety of different tasks, including manipulation, and then test them out on the robot in space.
While the primary purpose of the arm is perching, there are some other use cases that NASA is considering. An interesting one is to add a little bit of handrail to a spare payload bay in one Astrobee, and then grab onto it with the arm of another Astrobee. The gripper is also interchangeable, so other researchers could develop custom grippers to do a variety of different tasks (including manipulation), and then test them out on an Astrobee in space.
Useful and Versatile Autonomy
The key to making a robot valuable is to design and program it such that it provides a positive return on the amount of time invested into it. Astrobee needs to be able to operate independently of the astronauts to be useful—this can be fully autonomous operation, or teleoperation from the ground, but the goal is to avoid it being more of a hassle to use the robots than it is to just use a human instead. If Astrobee can reliably do its own thing without getting in the way of the astronauts, ideally with zero crew involvement, there are all kinds of tasks it could take over from them.
The Astrobee team has identified several things that the astronauts spend time doing that Astrobee could do just as well. One is taking video of crew activities, says Smith: “The state of the art right now is that the crew themselves set up a camcorder, and we’d like it if the flight controllers [on Earth] can position a camcorder so the crew don’t have to.” With its built-in camera and perching arm, Astrobee would provide a stable view that flight controllers could move around however they wanted, while the astronauts just keep on doing whatever they’re doing.
The crew also spends time doing a lot of really boring stuff like taking sound readings all over the space station, or doing inventory with RFID, or checking CO2 levels. These dull, repetitive housekeeping projects are, to be blunt, a waste of astronauts’ time, even as they’re mandatory for the long term safety of the ISS. If Astrobee can take over, that gives the humans more time to do the things that humans are good at, like science, or observing the behavior of a can of mixed nuts.
Looking Good
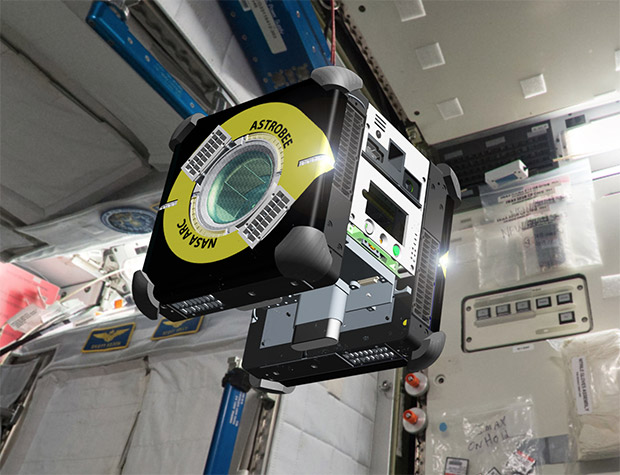
Image: NASA ARCA rendering of Astrobee’s final design.
While the prototype Astrobee that we saw at NASA Ames was pretty cool-looking just in terms of hardware, the version of the robot that starts work on the ISS will be much more visually interesting. Astrobee’s final look is the project of Yun-kyung Kim, an HRI researcher at NASA Ames. It’ll be covered in colorful, graphical “skins” made of nomex fabric, which researchers can design themselves, or the designs could be outsourced, providing a fun way for kids to get involved with space robots. Besides looking cool, part of the reason for these skins will be to help give the robot an easily identifiable front and back, which is not necessarily obvious when you’re looking at a cube in an environment with arbitrary directionality. Knowing where the front of Astrobee is will be important for the astronauts, since that’s the way the robot will be travelling.
The plan is also to outfit Astrobee with an array of LEDs around the impeller intakes, which can be used to visually communicate simple information. Things like turn signals, or an indication of what task the robot is performing, or whether it’s being teleoperated or in autonomous mode. The robot does have a touch screen, but the LEDs are intended to be much simpler and more immediate. Astrobee has speakers as well, and Kim is working on ways of using sound to help Astrobee communicate to the astronauts (or alert them) without being too noisy or annoying.
Heading to Space
NASA expects to have Astrobee on orbit at some point in the 2018 fiscal year, which covers October 2017 through September 2018. They’ll be sending three of them to the ISS, although only two robots can fit onto the dock at once: The third will be packed away in a space closet somewhere, but the crew will be able to pull it out to participate in some triple Astrobee experiments. It’ll probably take a little while to get these robots up and running—besides installing the dock, the astronauts will have to help out with making a map of the station so that the robots will be able to navigate autonomously. Crew time is always at a premium, but the hope is that once Astrobee is good to go, it’ll be able to free up some of that time in return by helping out around the station.
Astrobee will also be taking the place of SPHERES, and as a part of that transition, the idea is that NASA’s Guest Scientist Program will eventually provide a way for scientists around the world to run experiments on the robots, in both hardware and software. In the past, SPHERES participation has been limited since it demands constant astronaut supervision along with extra time for setting up the robots and then stowing everything again, but the increased autonomy of Astrobee should result in more opportunities for collaboration and research.
NASA’s plans for its space robots have been ambitious to an extent that they haven’t always been able to live up to their potential. Usually, this is because too much participation is required from the human crew. Astrobee is promising because it was designed specifically for autonomous operation, and to be assistive for the human crew. Robonaut was supposed to do the same thing, but it still hasn’t, because it’s been too difficult and time intensive for the crew to get it to work. If Astrobee can make it over that first hurdle, to the point where it achieves a useful level of autonomy, it has the potential to show the entire Earth exactly how valuable a little space robot can be.
Quelle: IEEE