
.
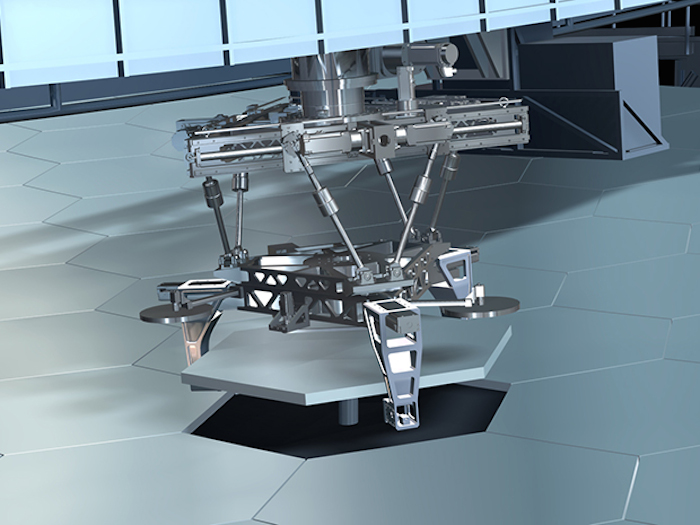
Illustration: Mitsubishi Electric
Mitsubishi robot grabbing a hexagonal mirror.
The prosaically named Thirty Meter Telescope (TMT) project, a planned observatory to be built on Mauna Kea, the Big Island, in Hawaii, is huge in every way: a reported US $1.4 billion dollar budget, a giant mirror composed of 492 smaller mirror segments, and a goal of investigating not just the stars in our Milky Way but galaxies forming at the very edge of the observable universe.
Though this project is backed by the governments of China, Japan, Canada, and India, as well as the United States, it may never be built. For its location is considered sacred by some Hawaiians, whose protests have been heard all the way to the State Supreme Court of Hawaii, which in December 2015 invalidated TMT’s previously granted building permit.
With the project suspended for over a year, involved scientist and construction companies can only keep their fingers crossed that the contested case will go their way. In the meantime, Mitsubishi Electric, which has developed the main structure of TMT, announced this week the completion of a prototype robot for a segmented-handling system (SHS) to install and replace the mirror segments. No easy task, given each hexagonal segment weighs about 250 kilograms and measures 1.44 meters across corners.
“Our original design and use of a force-control algorithm helps to reduce the time needed to replace the segment mirrors by 60 percent compared to conventional designs”
—Tomonori Sato, Mitsubish Electric
The glass mirrors are coated with aluminum to make them reflective. But the aluminum degrades over time and recoating is required roughly every two years. To retrieve a particular mirror for maintenance and to replace it with a reserve mirror requires some heavy lifting—albeit with a gentle touch, so as not to damage the relatively fragile glass. And this is where the SHS robot system comes into play.
The robot moves forwards and backwards along a 15-meter bridge. The bridge is able to rotate around the circumference of the mirror, and this allows the SHS robot to be placed over any of the 492 segments.
A human operator keys in a particular segment’s location for the robot and then raises the segment by means of a motor-driven installation shaft. From that point on, the rest of the operation is fully automated.
The SHS robot has 6 degrees of freedom of movement. To ensure the load on the segment is evenly balanced, the robot is equipped with three independent arms with grips used to grasps the targeted mirror, and readying it for transportation.
.
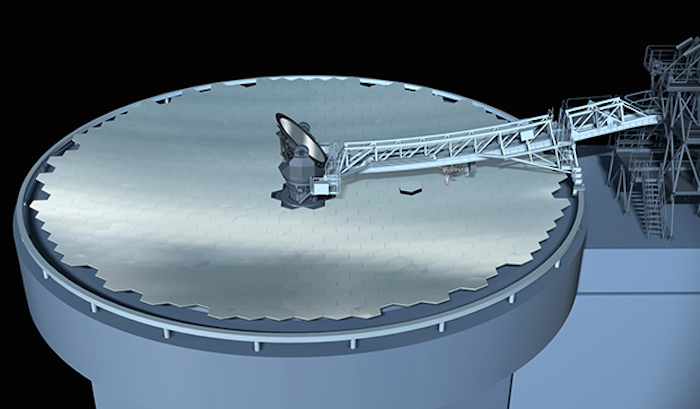
Illustration: Mitsubishi Electric
The surface of the mirror is highly reflective, which makes it difficult for the robot to precisely judge the distance and angle of the target segment. So Mitsubishi has designed a vision system that projects three checkered-flag patterns onto the segment. Vision sensors check the reflected patterns, and the robot adjusts its height and angle of rotation until the patterns match a predetermined pattern, indicating the robot is correctly positioned to take hold of the segment.
A force sensor, which detects the applied load on the mirror to within 1 kg of accuracy, is employed to prevent errors in the grasping of the segment, because load imbalance can distort the glass. Sensor data is used to control the SHS robot and to maintain an even load on the arms.
.
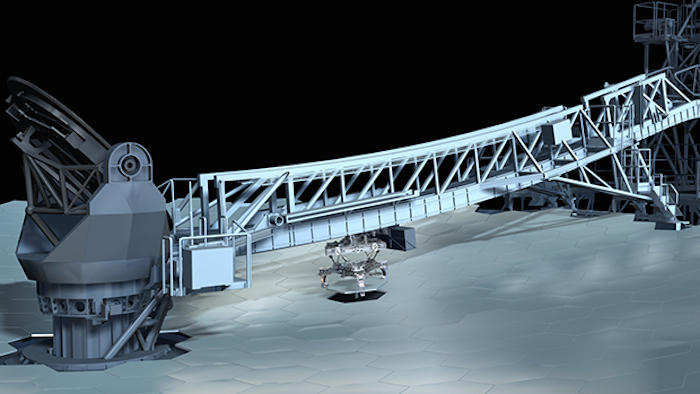
Illustration: Mitsubishi Electric
The segment is then transported beneath the bridge back to a maintenance center for cleaning or recoating. A replacement mirror is loaded by hand and the robot returns to its previous location and lays down the segment.
“Our original design and use of a force-control algorithm helps to reduce the time needed to replace the segment mirrors by 60 percent compared to conventional designs,” Tomonori Sato, senior manager of Mitsubishi Electric’s Autonomous Control Systems Development Project Group, told IEEE Spectrum. “We have four patents pending for the technology. One for the mechanism of the SHS robot, two for the force-control technology, and one for the vision sensing.”
He added that even in the worst-case scenario of TMT getting canceled, “astronomy must continue to advance. Besides, this is not the only large-scale telescope project being built. So we believe SHS will have much to contribute to other similar projects.”
Quelle: IEEE
4451 Views