
.
16.11.2015
THE UPS AND DOWNS OF A COMET’S SURFACE
This time last year little was known about Agilkia, the area chosen as Philae's landing site. One year on and the situation has changed, thanks to remote and in-situ measurements that have contributed to building up a picture of this iconic area on the comet.
As can be seen from the many results reported in this blog, Rosetta is providing unrivalled information about the surface of comet 67P/Churyumov-Gerasimenko. One team has been looking in particular at the region around where Philae touched down in order to put the lander's results in their correct global context.
.
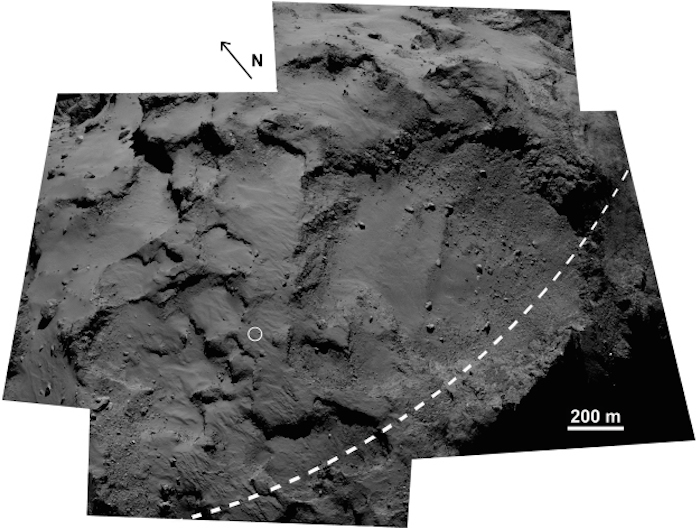
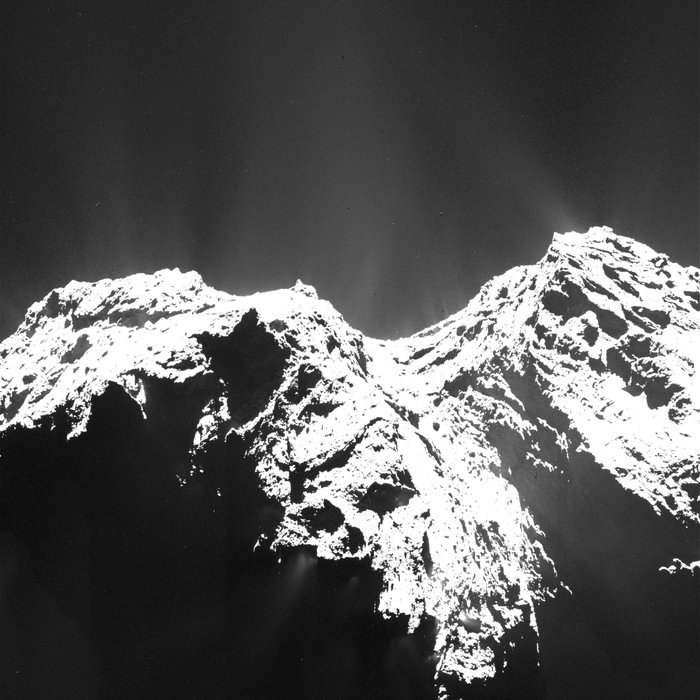
The Agilkia area on comet 67P/Churyumov-Gerasimenko. The circle indicates where Philae touched down for the first time on 12 November 2014. The dashed line marks the comet’s equator. The large depression is the Hatmehit region. This image is a composite of five frames from the OSIRIS Narrow Angle Camera, acquired on 14-15 September 2014. (An unannotated version of this image is available here.)Credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
.
Agilkia was the name chosen for the 1 km^2 landing ellipse at which Philae was targeted. Last year, as Rosetta drew closer to the comet, smaller and more distinct terrains within this ellipse became apparent. Fiorangela La Forgia, of the University of Padova, Italy, and colleagues have studied images from OSIRIS, the science camera on Rosetta, to define these areas according to their geological appearance.
On 12 November 2014, Philae touched down as planned in Agilkia, within a region named Ma'at. (Comet regions, defined according to their geomorphology, have been named after ancient Egyptian deities.) It then rebounded, and after two hours drifting about 100m above the comet surface, it settled into its final position, named Abydos and thought to be located on the other side of the Hatmehit region, close to the border with Bastet.
From OSIRIS images, we see that Ma’at, and the neighbouring region Nut, are mainly covered by smooth deposits of fine-grained material. The size of these grains was revealed by the ROLIS images from Philae to be of the order of a few centimetres. Although the depth of this layer is unknown it is probably highly variable across the comet: a 35 m-wide impact crater in the Ash region shows that the depth there may reach several metres, whereas in other places, the view across walls of more compacted material suggests that the layer is thin.
This layer may be the result of 'airfall', which is produced when dust is ejected from the surface but lacks the necessary velocity to escape from the comet. Instead it falls back, dusting the surface. There are a number of longitudinal dune-like structures visible in the Agilkia area, which seem to indicate the drift-paths for this airfall. This is unusual on comets and may be the result of a prevailing 'wind' direction in the comet's gas activity.
Fiorangela and her colleagues mapped the local gravity across the Agilkia area and conclude that the dunes are not caused by dust piling up under the effect of gravity because the regions concerned are almost flat.
The Agilkia area also contains some pits. These are smaller than another population of pits already observed on the surface of the comet, which may arise from the surface collapsing to form sinkholes, and which sometimes generate jets of material that spray from the comet.
One suggestion is that the smaller pits are related to ice. Several bright spots have been seen on the smooth dusty plains that run across 67P/C-G’s surface. The most obvious interpretation of these is that they are icy chunks of comet material that have been partially buried by the airfall. Subsequently, as the comet approached the Sun, the added energy has caused them to sublime. This ejects the fine dust particles too, leading to the excavation of the pits.
.
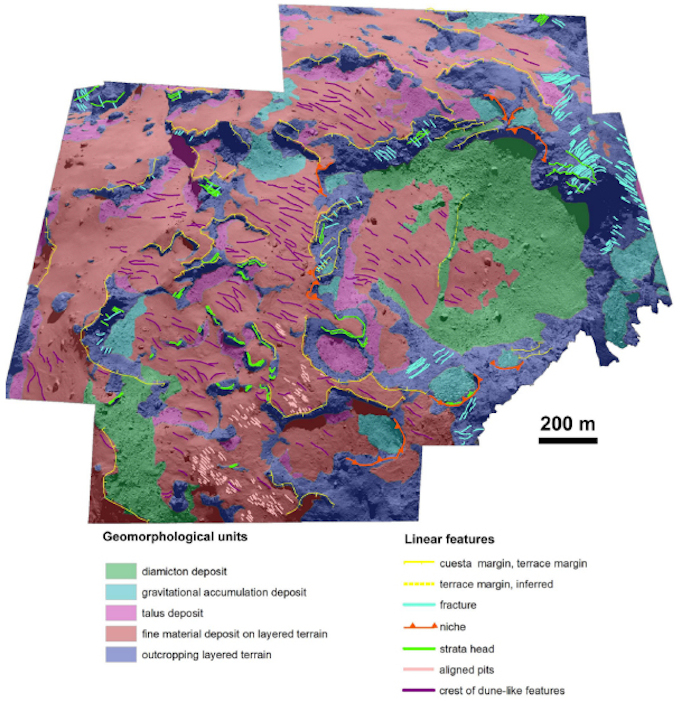
A geomorphological map of the area referred to as Agilkia. The main geological units have been identified on the basis of their shape and structure.
Much of this area, which includes the Ma'at and Nut regions, is covered by smooth deposits of fine-grained material (indicated in pink). Dune-like features (magenta lines) within these regions seem to be aligned in a similar direction suggesting that there is a prevailing direction associated with the comet's gas activity.
The formation of chains of small pit-like features (pink lines) is attributed to the effect of sublimation of icy chunks.
Deposits of fine and coarse material (light blue) are observed at the foot of various outcrops (yellow lines). This could be due to the accumulation of material arising from local gravitational slopes.
Within the large Hatmehit depression the greater part of the floor is covered with fine material mixed with boulders – this is referred to as diamicton. Much of the remainder of the floor is covered with fine-grained material forming dune-line structures, as seen in Ma'at and Nut.
A detailed description of the features of this region can be found in "Geomorphology and Spectrophotometry of Philae's Landing Site on Comet 67P Churyumov-Gerasimenko" by F. La Forgia et al., doi:10.1051/0004-6361/201525983, published in the Astronomy and Astrophysics special issue on Rosetta mission results pre-perihelion.
.
There are also widespread outcrops, such as cuestas (hills with a steep slope on one side and a shallow slope on the other side), terraces and steep walls, around the region where Philae touched down, as well as many boulders strewn across the surface.
Philae is thought to have finally come to rest in the Hatmehit region, close to the border with Bastet. Although the exact location is still a matter for ongoing investigation, Hatmehit itself is a circular depression that is covered with dune-like features and boulders of various sizes. The nature of this depression is still unknown. From their study of the region, Fiorangela and colleagues conclude that it is not an impact crater but could be an area that sank following the sublimation of sub-surface ices.
As well as looking at the form of the landscape in Agilkia, the team also looked at the photometric properties, to gauge how much light the surface reflects at different wavelengths. The simple answer is: not a lot. The landing site shows an average reflectance of just 0.96% in the orange band (649.2 nm; one of five filters on the OSIRIS camera).
The team reports that there is a marked similarity between the geological units and the reflectance. In particular, smooth deposits have the highest reflectance compared to the outcropping material. These readings are compatible with the surface of the comet being composed of organic material (as reported by the VIRTIS team earlier this year) that shows only small local variation. Nevertheless, Fiorangela and her colleagues suggest that this variation must be the result of small differences in the organic compounds that are present because the combined reflectance and colour variations cannot be explained by surface texture and grain size alone.
Put together, these results present a growing picture of the overall geological and compositional properties around the Philae landing site. As such, they will allow the science teams to put the specific details of the lander's measurements into a global comet context.
---
THE SOUND OF PHILAE CONDUCTING SCIENCE
Philae’s SESAME-CASSE ‘listened’ to the lander’s MUPUS instrument hammer the surface of Comet 67P/Churyumov-Gerasimenko last November. Martin Knapmeyer from the German Aerospace Centre, DLR, tells us more.
SESAME-CASSE is the Cometary Acoustic Surface Sounding Experiment located in the lander’s feet. It takes the form of three accelerometers, each of which records acceleration in three directions (one vertical and two horizontal). MUPUS comprises the Multi-Purpose Sensors for Surface and Subsurface Science – including the MUPUS penetrator that was activated towards the end of Philae’s first science sequence on 14 November 2014.
It was recognized early in the preparation of both experiments that the hammering mechanism of MUPUS, which drives a thermal probe into the comet’s surface, would serve as an acoustic source for ‘sounding’ the subsurface with CASSE. The determination of the propagation velocity of sound would allow scientists to look at possible layering in the comet’s surface and subsurface materials, important for understanding its evolution.
.
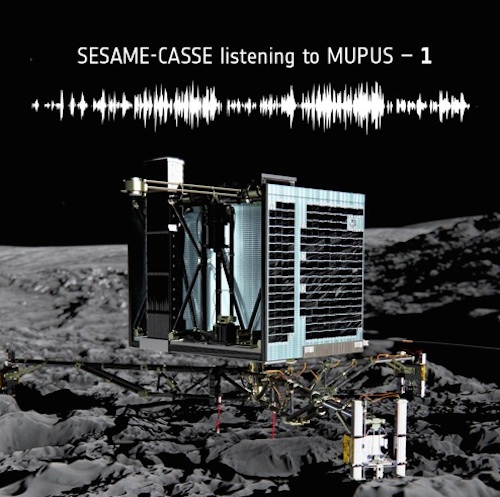
The CASSE instrument listened to the hammering of MUPUS for 2h 15 min. Due to memory limitations, CASSE was not able to take continuous recordings, but only a few seconds at a time. Several waiting periods were also included to give MUPUS time to reach depths of 10 cm, 20 cm, and 30 cm. A total of 15 hammer strokes were recorded, and one of the recordings contains two signals (the first sound, left, is heard at about 3 and 9 seconds respectively). The time between the strokes matches the charge time of the hammer mechanism expected at that time, thus this particular recording proves that CASSE was really recording hammer strokes.
The second sound file (below) contains hammer stroke no. 129 (as determined from the MUPUS housekeeping catalogue), which was recorded on Philae’s +Y foot. This stroke was executed at the highest energy level of the hammer system. All three channels of the +Y foot are mixed into the sound file, which is presented at real playback speed, in stereo. The signals on the other two feet were, in this case, much weaker and their recordings would mainly add to the background noise.
By looking at the strength and quality of the signals received by each foot, conclusions could be drawn about the orientation of Philae on the surface of the comet. Signal quality differs between feet, but several strokes were recorded on all three feet. From this the CASSE team concludes that all three feet of Philae have mechanical connection to the surface.
The CASSE team can also rule out that signals propagated through the structure of the lander only, since we see arrival time delays of several milliseconds between the individual feet, while delays due to asymmetries in the lander would amount to less than the sampling interval (i.e. microseconds). Signals traveling through Philae's structure would thus arrive synchronously at all feet rather than foot by foot.
“The CASSE listening experiment has proved to be the first active seismic experiment conducted on a celestial body since the lunar seismic profiling experiment carried out by Apollo 17 astronauts on the Moon in 1972,” says Martin.
He adds: “The geological interpretation of our comet data is still ongoing. We obtained very low wave propagation velocities, typical for loose, highly porous materials but we still have to analyse what clues on layering we have in order to reconcile this with the inability of MUPUS to significantly penetrate the ground.”
---
FROM ONE COMET LANDING TO ANOTHER: PLANNING ROSETTA’S GRAND FINALE
As announced in June along with confirmation of the mission’s extension, Rosetta teams are planning to end the operational phase of the mission in a controlled impact of the orbiter on the surface of Comet 67P/Churyumov-Gerasimenko at the end of September 2016. While the specific details of the trajectories and impact site are still under discussion, ESA’s Rosetta Spacecraft Operations Manager Sylvain Lodiot, Project Scientist Matt Taylor, and mission manager Patrick Martin, share some background information on the planning of this dramatic mission finale.
Why will the mission come to an end?
Following perihelion in August, Comet 67P/C-G and Rosetta are now moving away from the Sun and back out towards the orbit of Jupiter. This creates a number of challenges:
Reduced solar power
As the comet recedes from the Sun, the amount of sunlight falling on Rosetta’s solar panels will drop significantly. As the power drops, it will not be possible to operate all of the scientific instruments at the same time. Ultimately, the point will be reached where Rosetta would have to be put back in hibernation, as it was for the 31 months leading up to January 2014. However, this time Rosetta will follow the comet out beyond the orbit of Jupiter on its 6.5-year journey around the Sun, further from its source of power than ever before.
On top of this, the spacecraft will have been in space for over 12 years, two of them spent in the comet’s dusty environment, with degradation of the solar arrays expected to further reduce the available power.
Solar conjunction
By September-October 2016, Rosetta and the comet will appear very close to the Sun as seen from the Earth, making the uplinking of operational commands and the downlinking of scientific data extremely challenging. On 1 October 2016, the spacecraft will enter a period of conjunction, i.e. it will be behind the Sun as seen from Earth.
Reduced data rates far from Earth
The increased distance from Earth and apparent proximity to the Sun lead to a significant drop in data rates. By early July 2016, we should be getting 91kbps via NASA’s DSN 70m ground stations and only 22 kbps via ESA’s ESTRACK 35m stations. By comparison, by mid September 2016, these rates will drop to 57 kbps via DSN and only 14 kbps via ESTRACK, similar to a 1995 era dial-up modem. Access to NASA’s bigger dishes is not always guaranteed, due to the high demand for their use by other missions.
These low data rates, combined with reduced power availability, will lead to difficulties starting in August 2016, as the instrument teams and science operations planning teams at ESAC work to deal with power-sharing issues and a much-reduced science data download capacity.
Why can’t you put the spacecraft back into hibernation?
In principle, Rosetta could be put back into hibernation and awakened several years later as the comet begins to approach the Sun again. In practice, however, this does not appear possible.
First and foremost, the comet’s aphelion – maximum distance from the Sun – is further than Rosetta experienced during its previous hibernation between 2011 and 2014. There will not be enough power to control the spacecraft, including, for example, the thermal control of the spacecraft – meaning it could freeze – and not be able to come out of hibernation at all.
Second, Rosetta relies on propellant to manoeuvre around the comet as it carries out its scientific measurements, and this is ever depleting, limiting any renewed post-hibernation operations.
Third, the spacecraft and science instruments are aging and will be well beyond their nominal operating lifetime post-hibernation.
These constraints led the Science Working Team to consider scenarios that would see the mission end in September 2016. Taking into account the available resources, the SWT decided that the ultimate end would be to first make a slow approach to the comet, getting back to within 10 km and even closer. Getting this close has not been possible for much of the past year due to the high activity of the comet, and there is much to be gained scientifically in investigating the low altitude region of the comet’s coma and studying its post-perihelion surface in great detail. Then Rosetta would begin a slow descent towards the surface, taking scientific data at very low altitudes, and ultimately leading to a controlled impact, ending this landmark scientific mission with Rosetta joining Philae on the surface of the comet.
In the meantime, the upcoming months of Rosetta operations will see a renewed focus on close proximity to the comet as its activity continues to drop, as well as investigations of previously uncharted territories at larger distances around the comet, including the tail region.
What does the landing scenario currently look like?
We are still discussing the sequence of events that will take place in Rosetta’s final weeks. Operations very close to the comet will be very complex and challenging, even more so than the trajectory planned by the flight dynamics team in 2014 to deliver Philae to the surface.
The key reason is that the closer Rosetta gets to the comet, the more important its non-uniform gravitational potential will become. This will have a significant impact on its trajectory, with huge perturbations in its apogee height – the furthest point from the comet on an elliptical orbit – expected. This will require much more control on the trajectory and therefore many more manoeuvres – our planning cycles will be reduced significantly.
The broad plan is to fly Rosetta in bound, highly-elliptical bound orbits that will take us as close as possible to the comet in the last two months of the mission, with flyby distances less than 1 km from the surface towards the end: the instruments will be able to collect great scientific data, including incredible images. In the last days of the mission, Rosetta will be on ever-closer bound elliptical orbits. We will then perform a final manoeuvre to put Rosetta on a controlled, slow collision course with Comet 67P/C-G. Subject to possible changes based on final flight dynamics analyses, the controlled impact is foreseen to take place on 30 September 2016.
Will we be able to communicate with Rosetta during the final descent?
During the final ‘collision trajectory’, the spacecraft’s high-gain antenna will be Earth-pointing, making it possible to get back telemetry and scientific data all the way down to contact. However, once impact has occurred, it is highly unlikely that any further communication with the Rosetta will occur.
Why can’t we remain in contact with Rosetta on the surface?
There are two parts to this question: will Rosetta continue to function on the surface, and if so, will we be able to receive any information from it?
Rosetta was not designed for a landing. Even under a slow impact, the very large solar panels may be damaged, and some of the instrument booms sticking out from the body of the spacecraft may buckle or snap off. Under the very low gravity of the comet, the spacecraft may tumble, further damaging it.
Furthermore, as Rosetta is solar-powered, to be able to operate it would have to land in a fully-illuminated part of the comet. As the comet rotates during its 12.4-hour day, the arrays would likely point away from the Sun, reducing the power below the operational threshold.
Critically, even if Rosetta were to function on the surface for a while, it would be extremely difficult to communicate. If the high-gain antenna points away from the Earth just half a degree, we would lose line-of-sight contact with ground stations on Earth. In addition, the spacecraft orientation (for example for high gain antenna and solar array pointing) relies on operational star trackers; it could be that Rosetta lands ‘face down’ with the star trackers pointing into the surface and the instruments pointing ‘up’ into space.
All in all, it is foreseen that Rosetta’s mission will end at the point of contact on to the surface of Comet 67P/C-G, a symbolic finale to an epic journey spanning almost 20 years of planning and preparation, and 12 years in space.
---
COMETWATCH 12 NOVEMBER – ONE YEAR ON
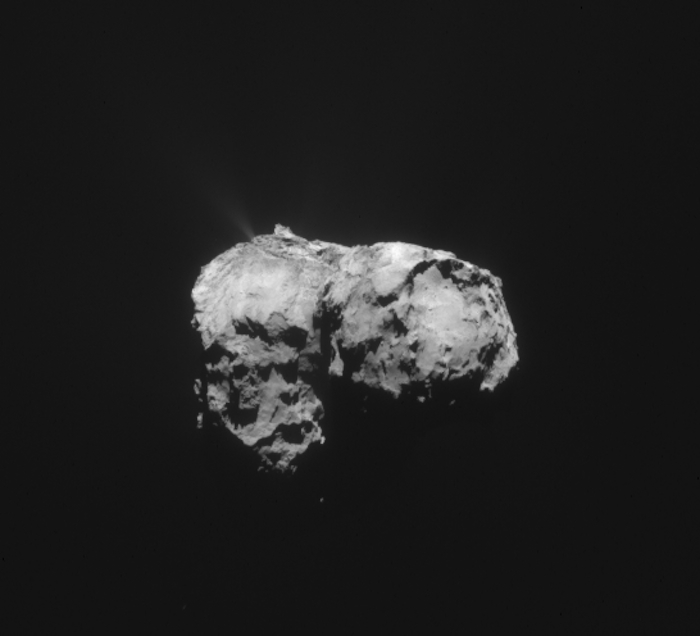
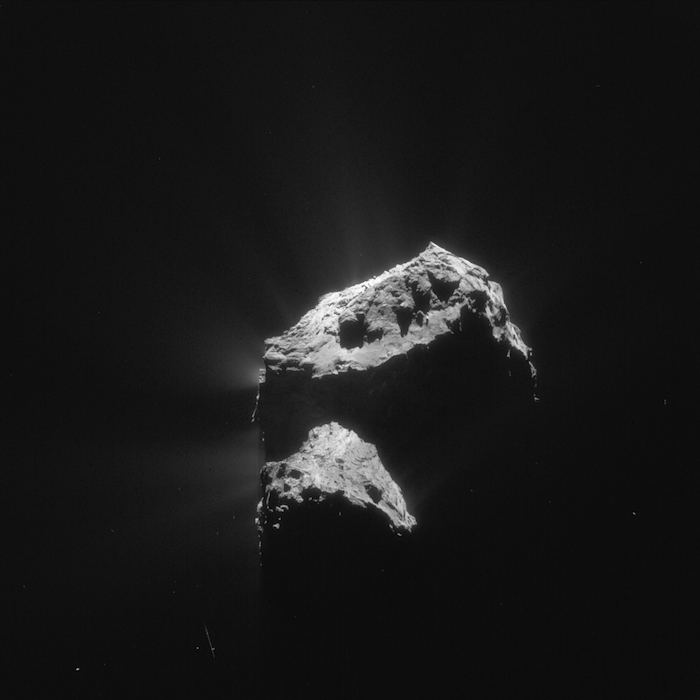
Today’s CometWatch entry was taken yesterday by Rosetta’s NAVCAM, on the anniversary of Philae’s historic landing on Comet 67P/Churyumov-Gerasimenko last year.
The image was taken from a distance of 177.7 km; the image scale is 15.1 m/pixel and the image measures 15.5 km across. It has been lightly enhanced to better show the comet’s activity.
-
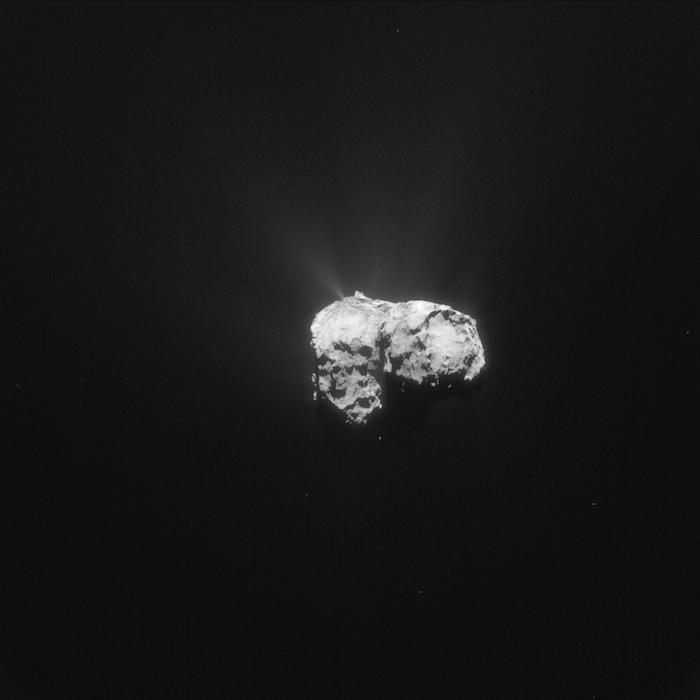
Single frame enhanced NAVCAM image of Comet 67P/C-G taken on 12 November 2015. Credits: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0
With Rosetta closer to the comet, more surface details can be seen again. On the large lobe, to the left, the relatively flat surface of Aker can be seen to the top, with Khepry to the left and Babi in the foreground. Hints of Anhur can also just be seen beyond Aker.
On the small lobe, the circular depression Hatmehit takes centre stage. Philae’s first touchdown point, Agilkia, is to the lower right of Hatmehit in this orientation, with its final landing site, Abydos, towards the horizon at the top of this view.
In case you missed it yesterday, a new animation was released by the lander teams depicting Philae’s impressive flight across the surface of the comet from Agilkia to Abydos. More about the outlook for Philae – and Rosetta – in the months and year ahead can be found in our comet landing anniversary article, here.
The original 1024 x 1024 pixel image of today’s Cometwatch entry is provided below:
.
-
Update: 20.11.2015
COMETWATCH 17 NOVEMBER
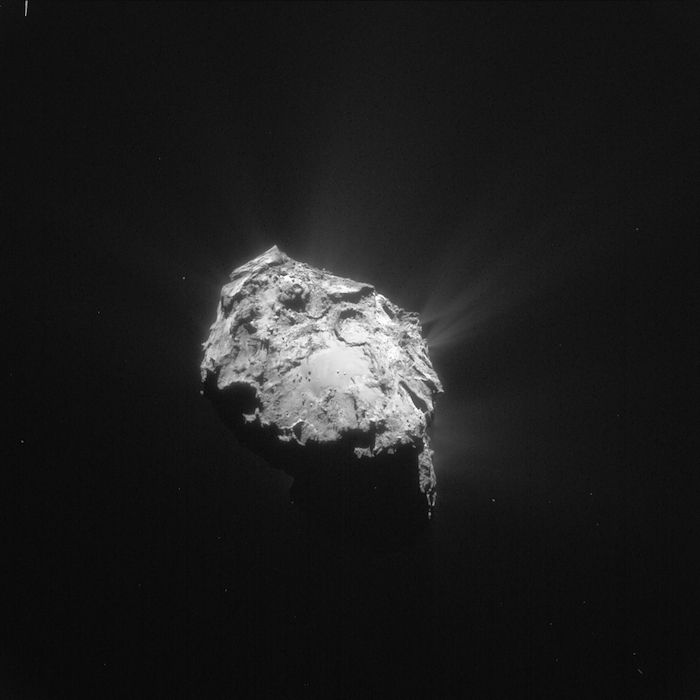
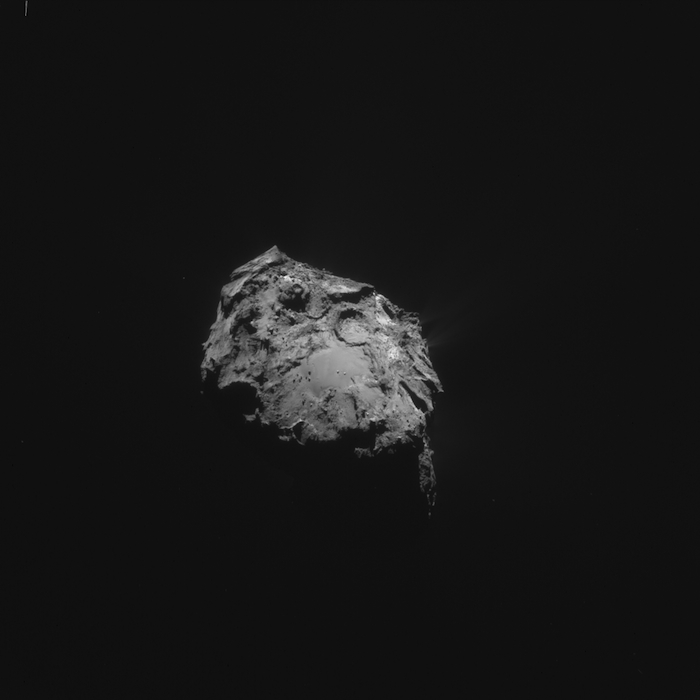
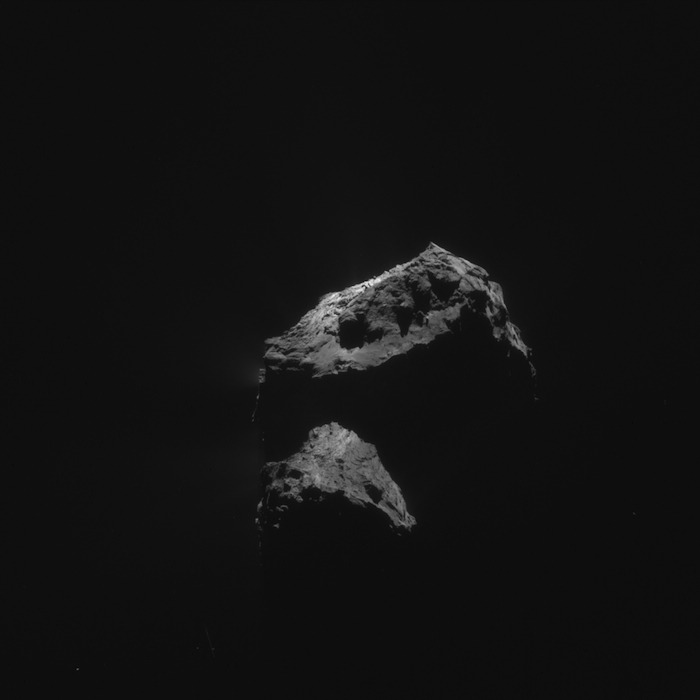
Today's CometWatch entry is a NAVCAM image taken on 17 November 2015, when Rosetta was 141.4 km from the nucleus of Comet 67P/Churyumov-Gerasimenko. The spacecraft has not been this close to the nucleus since weeks before perihelion, when the increased amounts of dust due to enhanced comet activity started interfering with navigation and Rosetta remained at larger distances from 67P/C-G.
.
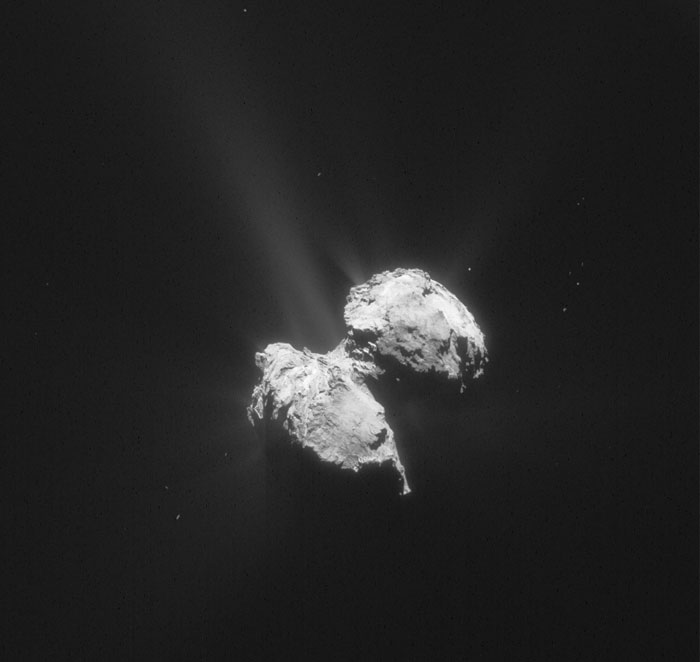
Single frame enhanced NAVCAM image of Comet 67P/C-G taken on 17 November 2015. Credits: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0
The scale is 12.1 m/pixel and the image measures 12.3 km across; the contrast was increased to bring out the comet's activity.
In this orientation, the large comet lobe is on the lower left, and the small lobe on the upper right. Outflows of dust are visible around the nucleus, particularly to the left.
On the small lobe, the circular depression of Hatmehit is well in sight, pointing to the upper right corner of the image, with the rougher terrains of Bastet visible below and the Wosret region to its left. Abydos, the final resting place of the lander Philae, is roughly at the centre of the small lobe in this view.
Hints of Sobek are visible on the comet's neck; on the large lobe are parts of Babi (right), smooth areas on Aker and Khepry (centre), and the more rugged Anhur and Khonsu (left).
The original 1024 x 1024 image of today's CometWatch is provided below:
.
Quelle: ESA
.
Update: 30.11.2015
.
COMETWATCH 22 NOVEMBER
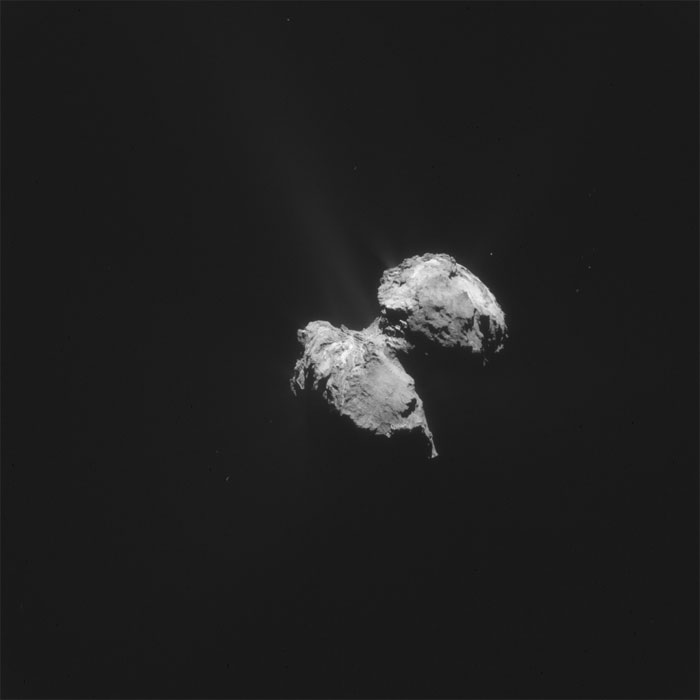
This week’s Cometwatch entry was taken by Rosetta’s NAVCAM on 22 November 2015 when the spacecraft was 127.7 km from the nucleus of Comet 67P/Churyumov-Gerasimenko.
.
Single frame enhanced NAVCAM image of Comet 67P/C-G taken on 22 November 2015. Credits: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0
The scale is 10.9 m/pixel and the image measures 11.1 km across. The contrast has been lightly enhanced to bring out the comet's activity without losing details of the nucleus.
A prominent active region is clearly visible towards the horizon on the right of the nucleus in this orientation, close to the comet’s ‘neck’.
Although faint, several diffuse jets of activity can also be seen emanating from the Imhotep region, which is cast in shadow in the foreground. Stretching the contrast of the image even further will reveal these active regions more clearly (but will wash out the nucleus).
The comet nucleus is oriented with much of the southern hemisphere visible, facing ‘up’. On the small lobe in the background, the relatively flat region of Wosret can be identified, with a transition through Sobek on the neck into Anhur on the large lobe in the foreground.
The original 1024 x 1024 image of today's CometWatch is provided below:
.

Quelle: ESA
.
Update: 7.12.2015
.
NEW COMET SHAPE MODEL
A new 3D shape model of Comet 67P/Churyumov-Gerasimenko has been released by ESA’s Rosetta archive team today. The model includes images taken by Rosetta’s NAVCAM up until mid-late July 2015, and reveals parts of the comet’s southern hemisphere that were not included in earlier shape models.
.
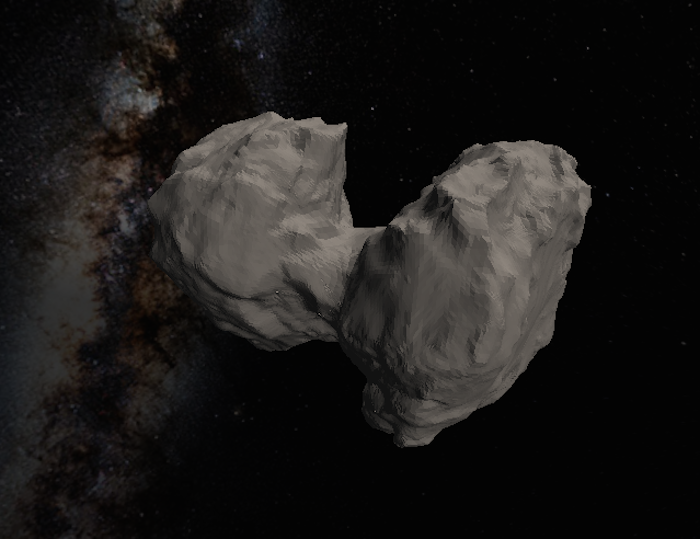
The updated shape model now includes recent images of the comet’s southern hemisphere. Click to explore and for download options. Credit: ESA/Rosetta/NAVCAM, CC BY-SA IGO 3.0
-
The release also includes .WRL, OBJ, STL files, which can be used for 3D printing.
At the same time, 681 images have been added to the Archive Image Browser covering the period 6 May to 30 June 2015 as part of ESA’s regular monthly release of NAVCAM images.
During this period the comet was heading towards perihelion on 13 August, the closest point to the Sun along its orbit, and so the images capture some details of the comet's increasing activity.
.
Caption: The latest Archive Image Browser release. Click to enter browser. All images: ESA/Rosetta/NAVCAM, CC BY-SA IGO 3.0.
-
Taking into account the upcoming seasonal holiday, the next NAVCAM archive release will be made early-mid January 2016.
For background information on what a shape model is, read our blog post: A shape model – what’s that?
We hope you enjoy using the updated shape model – do let us know if you've used it for your own projects, or if you have any questions about it, by writing in the comment box below.
---
COMETWATCH 27 NOVEMBER
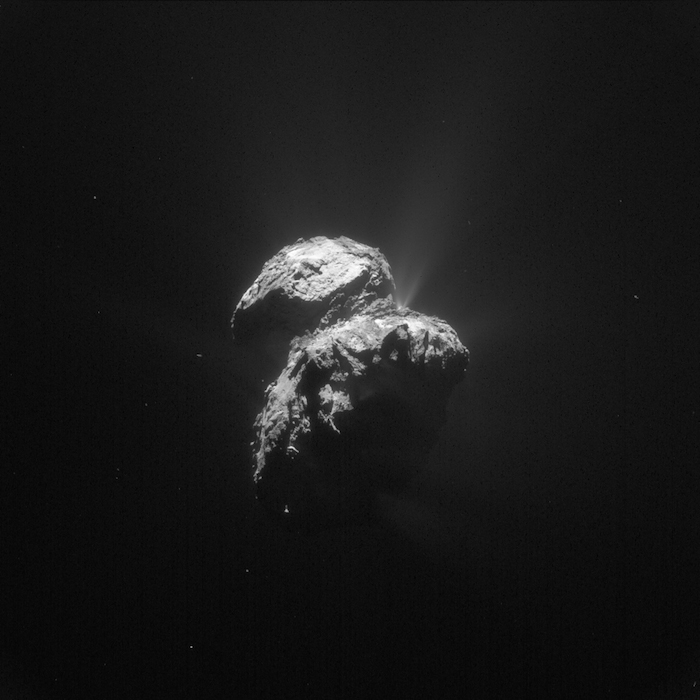
This week’s Cometwatch entry was taken by Rosetta’s NAVCAM on 27 November 2015 when the spacecraft was 124 km from the nucleus of Comet 67P/Churyumov-Gerasimenko.
The image scale is 10.6 m/pixel and the image measures 10.8 km across. The contrast has been lightly enhanced to bring out the comet's activity without losing details of the nucleus.
.
Single frame enhanced NAVCAM image of Comet 67P/C-G taken on 27 November 2015. Credits: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0
-
The image shows a beautiful view of Imhotep on the comet’s large lobe, but with the resolution of NAVCAM at this distance it is not possible to make out the same level of detail as seen in the OSIRIS images depicting changes in the smooth, central portion that were observed in this region before perihelion.
Perhaps the most eye-catching features of the image are the two groups of jets fanning out from the comet’s top-right horizon. Less defined jets can also be seen all around the sunlit horizon. The silhouette of the comet’s small lobe is also visible against the background ‘glow’ of activity towards the bottom left of the image.
The original 1024 x 1024 pixel image is provided below:
.
Quelle: ESA
-
Update: 11.12.2015
.
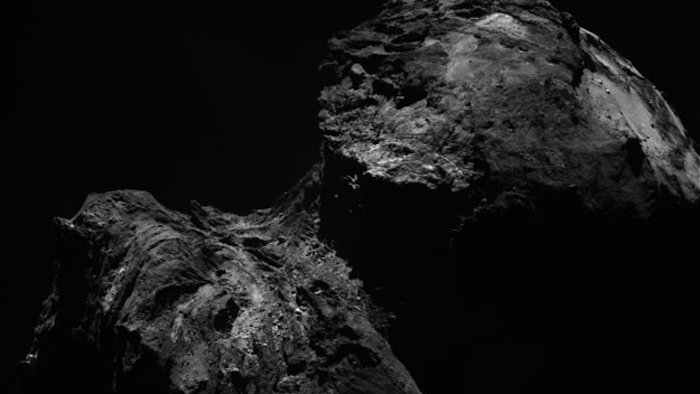
Comet on 10 December 2015 from OSIRIS narrow-angle camera
RIDE ALONG WITH ROSETTA THROUGH THE EYES OF OSIRIS
.
Rosetta’s OSIRIS camera team has launched a new website to showcase their recent images of Comet 67P/Churyumov–Gerasimenko.
The high-resolution images, taken either with the narrow- or wide-angle scientific imaging camera, will show the comet as recently as the day before.
They will be posted to a dedicated website but followers can also subscribe to a mailing list to receive the images directly via email.
The cadence of the images released will depend on the scientific operations of the spacecraft and in particular on the as-run OSIRIS observations on any given day, along with the availability of images downloaded from the spacecraft.
A minimum of an image per week should be expected, up to an image a day if they are taken daily.
“Following perihelion and a far excursion, we are now back at closer distances – about 100 km – to the comet, providing a view similar to that when we first arrived on 6 August 2014,” says Holger Sierks, principal investigator for the camera at the Max Planck Institute for Solar System Research in Göttingen, Germany.
“We’d like to share this view with the community and the general public, in near-real time, as we re-approach and eventually descend to the surface of the comet.”
The images will be released by a robotic system in JPG format, raw or calibrated as available, following a brief pre-selection by OSIRIS scientists. Basic ‘metadata’ stating the date, time, distance to the comet and the Sun, and the resolution of the image will be included with each.
There will not be a detailed scientific description of the images because the goal is to provide up-to-date ‘postcards’ of the comet. Traditional image releases with scientific interpretation will still be made, separately, in the usual way.
The images will also be added to our ESA galleries and shared on our Rosetta social media channels. In addition, we plan to showcase them in a weekly blog post alongside our regular navigation camera (NavCam) CometWatch feature.
“This new initiative is a welcome addition to our long-established NavCam CometWatch releases, and gives us another way to enjoy riding along with Rosetta as it follows the comet through the Solar System,” notes Patrick Martin, ESA’s Rosetta mission manager.
“Now that we’re closer to the comet again we’re looking forward to seeing its surface in more detail. We’re also looking forward to sharing a fantastic view as Rosetta descends to the surface of the comet next September,” says Matt Taylor, ESA’s Rosetta project scientist.
Quelle: ESA
---
COMETWATCH 7 DECEMBER
Today's CometWatch entry is a NAVCAM image taken on 7 December 2015, when Rosetta was 103.1 km from the comet nucleus.
.
Single frame enhanced NAVCAM image of Comet 67P/C-G taken on 7 December 2015. Credits: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0
-
The scale is 8.8 m/pixel and the image measures 9 km across. The contrast was increased to reveal the beautiful details of the comet's activity, especially on the upper and left sides of the nucleus.
With the large lobe up and the small lobe down, this image shows an interesting view of the comet and a stunning juxtaposition of lit and shadowed areas on the surface of 67P/C-G.
On the large lobe, the image offers a great view on the smooth terrains of Anubis and, further away, on the more irregular region of Atum. Towards the right, hints of Ash are also visible.
In this curious orientation, the two lobes appear as if they were separated, with the regions between them – Seth, on the right, Hapi at the centre and Sobek towards the left – cast in shadow. On the small lobe, the view is dominated by the complex terrains of Anuket.
The original 1024 x 1024 image of today's CometWatch is provided below:
.
Quelle: ESA
-
Update: 14.12.2015
.
LIVING WITH A COMET
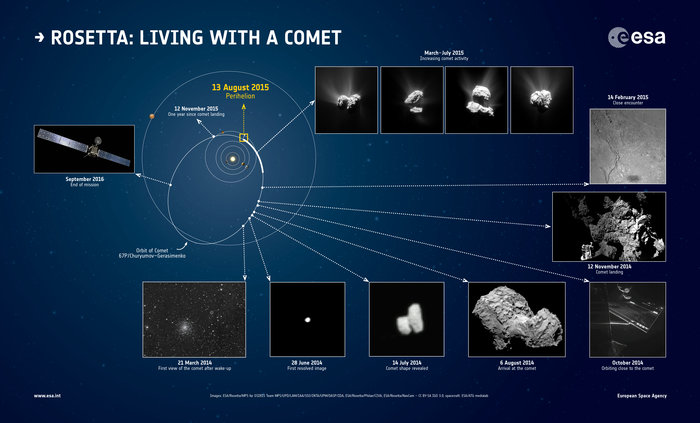
We can hardly believe we are approaching the end of yet another incredible year for the Rosetta mission, which has now spent nearly 500 days “living” with Comet 67P/Churyumov-Gerasimenko.
From dramatic close flybys to the peak of comet activity during the months around perihelion, 2015 has seen the Rosetta mission shine with scientific discovery. A slew of fascinating results have been published from both the Rosetta orbiter and the Philae lander teams in the last year, which have certainly triggered some intense discussion in the comments section on this blog!
As we did last year, we are planning to take a short break, between close of business on 18 December 2015 and 4 January 2016. During this time we don’t foresee any routine updates (aside from images that might be released via the new "OSIRIS image of the day" website), but we will of course inform you as soon as possible if something extraordinary happens.
.
COMET ON 12 DECEMBER 2015 FROM OSIRIS NARROW-ANGLE CAMERA
.
Single-frame OSIRIS narrow-angle camera image taken on 12 December 2015, when Rosetta was 104.4 km from the nucleus of Comet 67P/Churyumov–Gerasimenko. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
.
Due to the time required to review comments, the commenting function will be disabled on all posts and pages over this period – existing comments will remain, but no new comments can be submitted and added during the break. Furthermore, when we return in the New Year, the comment function will only be possible on subsequent new posts. We therefore kindly encourage you to wrap up existing conversations during this week.
It’s been a pleasure sharing the latest news with you this year and we’re delighted that so many of you are continuing to enjoy following the blog and being part of the Rosetta adventure with us here. Many thanks to our regular contributors and occasional visitors alike – we look forward to welcoming you back in the New Year when we’ll be getting ready for the mission’s greatest challenge yet: putting Rosetta on the comet in September 2016.
But for the rest of this week at least, it's business as usual!
Quelle: ESA
5573 Views