
.
19.11.2014
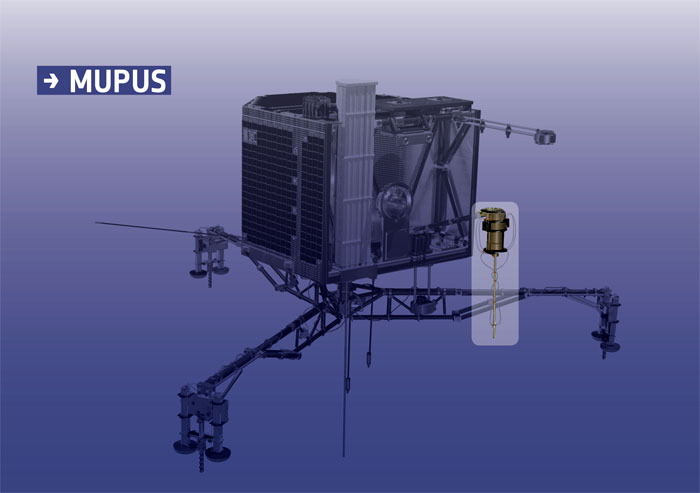
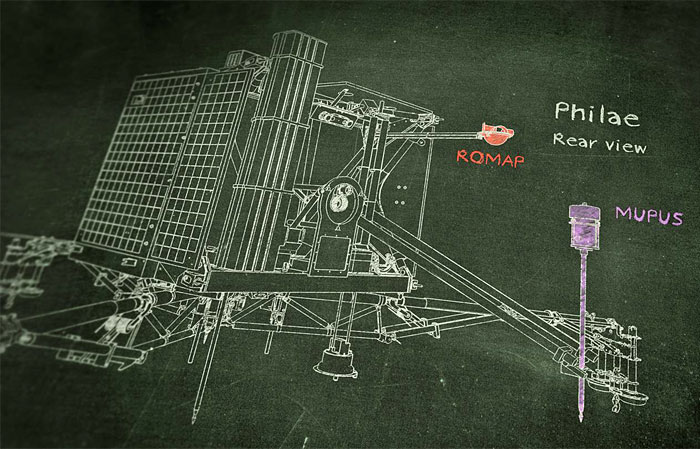
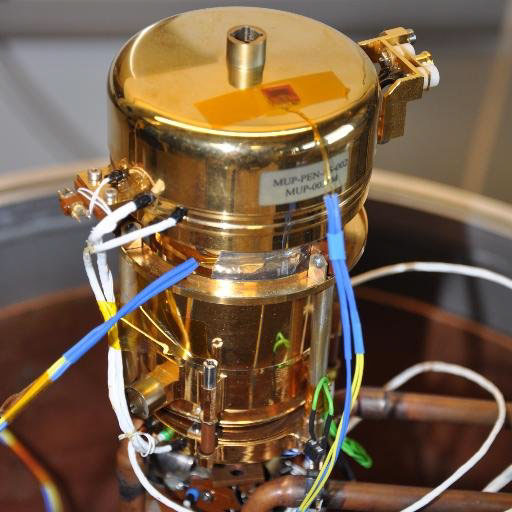
MUPUS-Experiment: Hämmern in 500 Millionen Kilometern Entfernung
Thermalsonde entdeckt harte Eisschicht und misst Temperatur von minus 170 Grad Celsius auf Churyumov-Gerasimenko
Die Thermalsonde MUPUS, eines von zehn Experimenten auf dem Kometenlander Philae, ist auf dem Kometen Churyumov-Gerasimenko auf sehr hartes - wahrscheinlich eisreiches - Material gestoßen und hat dort eine Temperatur von circa minus 170 Grad Celsius gemessen. "Das ist eine Überraschung! Mit solch hartem Eis im Boden haben wir nicht gerechnet", erläutert Prof. Tilman Spohn vom Deutschen Zentrum für Luft- und Raumfahrt (DLR), der das Wissenschaftler-Team der Thermalsonde leitet.
Eis unter lockerer Staubschicht
In der Nacht vom 13. auf den 14. November 2014 wurde die Thermalsonde vom sogenannten "Balkon" des Landers - das heißt von der nach vorne geöffneten Instrumentenbucht an der hinteren Seitenwand von Philae - ausgefahren und sollte sich rund 40 Zentimenter in den Kometenboden hämmern. Dies misslang, obwohl die Hammerleistung sukzessive auf die höchste Stufe gefahren wurde. "Aus Vergleichsmessungen im Labor haben wir abgeschätzt, dass die Thermalsonde wahrscheinlich unter einer zehn bis 20 Zentimeter dicken Staubschicht auf eine Schicht gestoßen sein muss, die eine Festigkeit wie die von Eis haben sollte", sagt DLR-Planetenforscher Prof. Spohn. Der Infrarotsensor des Instruments habe eine geringe thermische Trägheit der aufliegenden Staubschicht festgestellt. "Das Team geht davon aus, dass unter der sehr porösen Staubschicht Eis ansteht." Dieses Eis enthalte wahrscheinlich Staub und könne selbst durchaus auch porös sein, aber über Jahrhunderte bis Jahrmillionen thermisch gesintert, also immer wieder durch Temperaturschwankungen mehr und mehr zusammengebacken worden sein.
Messungen im Anflug und nach der Landung
Der Infrarotsensor der Sonde, die am Institut für Planetologie der Universität Münster zusammen mit dem Space Research Center in Warschau und anderen internationalen Partnern entwickelt wurde und inzwischen vom DLR-Institut für Planetenforschung betreut wird, hatte schon während des Anflugs und während der Sprünge über dem Kometenboden Daten registriert. Die ebenfalls zu MUPUS gehörenden Thermalsensoren und Beschleunigungsmesser in den Ankern konnten allerdings nicht zum Einsatz kommen, da die Ankerharpunen nicht ausgelöst und in die Kometenoberfläche unter dem Lander geschossen werden konnten. "Philae war nicht im Boden des Kometen verankert, stand möglicherweise schräg, eines der drei Landebeine hatte eventuell keinen Bodenkontakt - nach der Landung war überhaupt nicht klar, ob MUPUS sein Experiment wie vorgesehen würde durchführen können."
Seine endgültige Landestelle liegt vermutlich immerhin einen Kilometer von der ursprünglich angepeilten Landestelle entfernt - vor einer wahrscheinlich aus Eis bestehenden Wand. Dem Team des Lander-Kontrollzentrums des DLR gelang es aber, alle zehn Instrumente auf Philae zu betreiben und Daten aus dem All zu erhalten. "Wir sind sehr glücklich darüber, dass viele Messungen möglich waren und werten die Daten derzeit aus", sagt Prof. Tilman Spohn vom DLR. "MUPUS könnte wieder zum Einsatz kommen, wenn wir ausreichend Energie aufladen können. Dann können wir die Schicht untersuchen, auf der die Sonde steht, und beobachten, wie sich der Komet auf dem Weg näher zur Sonne entwickelt."
.
MUlti PUrpose Sensor / One of the instruments on the Rosetta Philae Lander.
Measuring thermal and physical properties on the surface of a comet.
Quelle: DLR
.
Update: 22.00 MEZ
.
REDDIT AMA 20 NOV 19:00CET START
Engineers from ESOC and the Lander Control Centre will take part in a reddit AMA (Ask me Anything!) on Thursday, 20 November 19:00CET start. More details here shortly.
.

.
DID PHILAE DRILL THE COMET?
Philae’s Sampling, Drilling and Distribution (SD2) subsystem was activated towards the end of the surface operations that Philae performed on Comet 67P/Churyumov-Gerasimenko last week, despite fears that it might alter the lander’s precarious position following its third touchdown. Here we present the latest update from the SD2 team.
SD2’s goal was to drill into the comet surface in order to collect and deliver samples to the COSAC and Ptolemy instruments inside the lander. It was the last of the lander’s ten instruments to be operated.
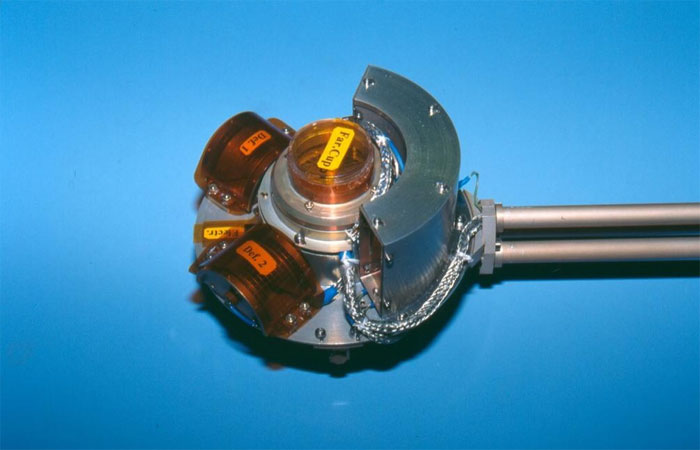
INTRODUCING SD2: PHILAE’S SAMPLING, DRILLING AND DISTRIBUTION INSTRUMENT
When Philae lands on comet 67P/Churyumov-Gerasimenko in November it will analyse ice and dust grains on the surface, and dig up to 23 cm into the comet to ‘taste’ pristine samples hidden below. SD2 – the Sampling, Drilling and Distribution device – will be the one to retrieve the samples, ready for other onboard experiments to study in detail. For example, SD2 will interface with COSAC and PTOLEMY to study the geochemistry of the comet, including hunting for complex organic molecules, and ÇIVA, which will image and study the composition, texture and albedo of the samples collected.
The mechanical unit of SD2 consists of a carbon fiber toolbox, a drill, and a rotating carousel. The average power consumption of SD2 during drilling is about 10 Watts, equivalent to one hundredth of the power consumed by a standard household drill!
The samples are taken from a maximum depth of about 23 cm below the comet’s surface at Philae’s landing site. After the drill reaches the desired depth, a sampling tube is extended from the drill bit to pick up the sample. The drill is then moved back to its home position, ready to deliver the sample to one of Philae’s 26 ovens, which are mounted on the rotating carousel.
Once the drill is at its home position with the sample, the carousel is rotated to put the assigned oven under the drill. The drill moves downward to place the sampling tube on the oven opening and then pushes the sample into the oven. The carousel is then rotated to deliver the sample to the instruments.
Two kinds of ovens are available: 10 medium temperature ovens (maximum temperature: 180°C) and 16 high temperature ovens (maximum temperature: 800°C). By heating the samples to different temperatures, a range of different frozen gases will be released for analysis, enabling the instruments to build up a picture of the comet’s ingredients. The samples retrieved by SD2 will also be used to measure characteristics such as density, texture, strength and thermal properties.
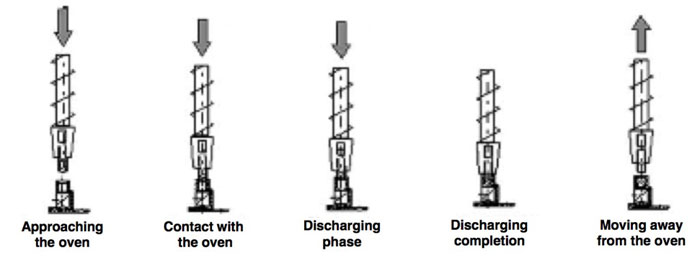
How SD2's drill and delivery system works
----
SD2 principal investigator Amalia Finzi has reported that the drill was deployed as planned, extending 46.9 cm below the balcony of the lander and 56.0 cm from its reference point.
“It was then retracted to the reference position, the carousel turned in a way that the sampling tube was in front of the right oven, the discharge operation from the sampling tube to the oven was completed, and the carousel rotated in a way that that oven was positioned at COSAC’s location,” she said.
Although the ovens worked correctly, the scientists do not yet know how much – if any – material was actually delivered to the ovens by SD2, or whether the instruments sampled dust or gas that entered the chamber during the touchdown.
Because Philae was not anchored to the comet surface, it is also possible that, if the drill touched a particularly hard surface material, it moved the lander instead of drilling into the surface. Furthermore, the SD2 instrument lacks dedicated sensors to determine whether or not the surface has been reached, whether a sample was then collected in the sample tube, or if it was then discharged into the oven.
But other instruments on board Philae can help understand what actually happened. For example, the downward-looking ROLIS camera obtained two images of the surface under the balcony, one before and one after the lander’s main body was lifted and rotated. Because of those movements, the SD2 ‘footprint’ may be included in those images and thus may be able to provide visual evidence that the drill interacted with the surface. We hope to be able to provide an update on this soon.
As for whether COSAC received a sample from the drill, the analysis is on-going.
“As far as we can see at the moment, SD2 and COSAC telemetry cannot reliably discern between lack of sample and insufficient gas generation from it,” says Amalia. “A CIVA-MV/MI image would have been needed for this purpose, which was not available for the first sample.”
Meanwhile, COSAC’s analyses on the data acquired from its surface measurements are on-going. But it is apparent that COSAC already ‘sniffed’ the comet’s atmosphere during the first touchdown, detecting organic molecules. The Ptolemy instrument is also reported to have successfully collected the ambient gases of the comet. Analysis of the spectra and identification of the molecules detected by both instruments are continuing.
Mario Salatti, Philae Program Manager for ASI adds: "We are all hoping that Philae wakes up and we can perform many more measurements on the surface of the comet, including the chance to drill again with SD2. The final site where Philae landed does not enjoy long exposure to sunlight, but on the other hand, it opens new perspectives. As the lander appears to be currently shielded by walls, the local temperature may be lower than it would have been at the chosen landing site. So if Philae wakes up, it might remain operative much longer than expected, possibly until perihelion, which is extremely exciting."
.
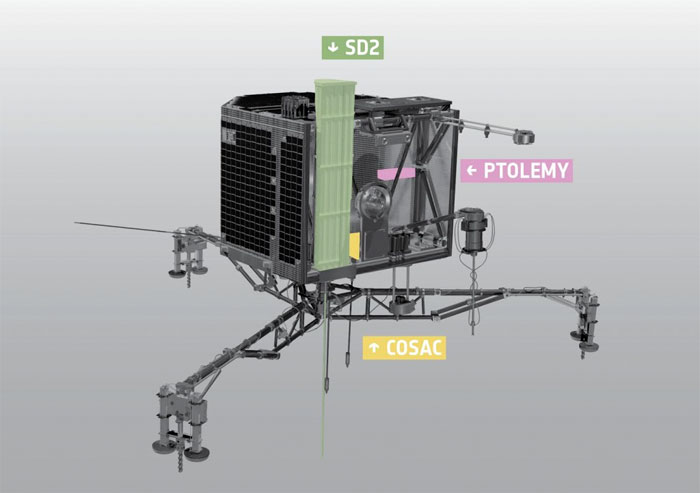
Focus on SD2, COSAC and Ptolemy. Credits: ESA/ATG medialab
.
The SD2 (Sample Drilling & Distribution) instrument was conceived by technologists at the Italian Space Agency, designed and developed by the SELEX ES in Milan, under the scientific responsibility of the Principal Investigator Prof. Amalia Ercoli Finzi from Politecnico di Milano: for more than 10 years, SD2 team has been planning SD2 operation sequences and validated them with the unit spare available at their institution’s laboratories.
COSAC Principal Investigator: Fred Goesmann, Max-Planck-Institut für Sonnensystemforschung, Katlenburg-Lindau, Germany
Ptolemy Principal Investigator: Ian Wright, Open University, Milton Keynes, UK.
Quelle: ESA
.
Update: 20.11.2014
.
ROSETTA CONTINUES INTO ITS FULL SCIENCE PHASE
.
With the Philae lander’s mission complete, Rosetta will now continue its own extraordinary exploration, orbiting Comet 67P/Churymov–Gerasimenko during the coming year as the enigmatic body arcs ever closer to our Sun.
Last week, ESA’s Rosetta spacecraft delivered its Philae lander to the surface of the comet for a dramatic touchdown.
The lander’s planned mission ended after about 64 hours when its batteries ran out, but not before it delivered a full set of results that are now being analysed by scientists across Europe.
Rosetta’s own mission is far from over and the spacecraft remains in excellent condition, with all of its systems and instruments performing as expected.
“With lander delivery complete, Rosetta will resume routine science observations and we will transition to the ‘comet escort phase’,” says Flight Director Andrea Accomazzo.
“This science-gathering phase will take us into next year as we go with the comet towards the Sun, passing perihelion, or closest approach, on 13 August, at 186 million kilometres from our star.”
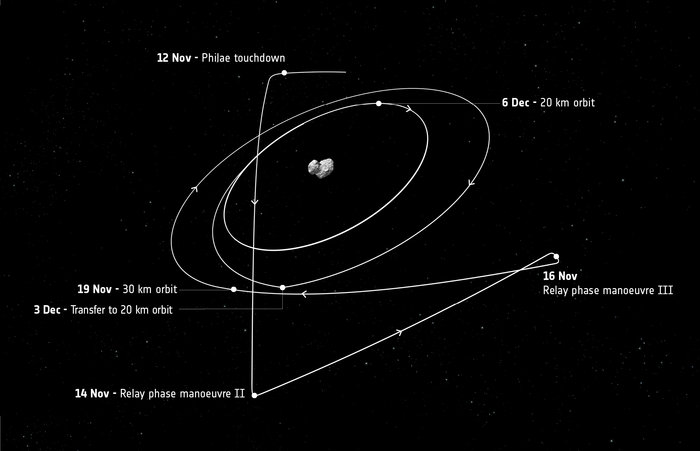
On 16 November, the flight control team moved from the large Main Control Room at ESA’s Space Operations Centre in Darmstadt, Germany, where critical operations during landing were performed, to a smaller Dedicated Control Room, from where the team normally flies the craft.
Since then, Rosetta has performed a series of manoeuvres, using its thrusters to begin optimising its orbit around the comet for the 11 scientific instruments.
“Additional burns planned for today, 22 and 26 November will further adjust the orbit to bring it up to about 30 km above the comet,” says Sylvain Lodiot, Spacecraft Operations Manager.
From next week, Rosetta’s orbit will be selected and planned based on the needs of the scientific sensors. After arrival on 6 August, the orbit was designed to meet the lander’s needs.
Getting as close as feasible
On 3 December, the craft will move down to height of 20 km for about 10 days, after which it will return to 30 km.
With the landing performed, all future trajectories are designed purely with science as the driver, explained Laurence O’Rourke and Michael Küppers at the Rosetta Science Operations Centre near Madrid, Spain.
“The desire is to place the spacecraft as close as feasible to the comet before the activity becomes too high to maintain closed orbits,” says Laurence.
“This 20 km orbit will be used by the science teams to map large parts of the nucleus at high resolution and to collect gas, dust and plasma at increasing activity.”
Planning the science orbits involves two different trajectories: ‘preferred’ and ‘high-activity’. While the intention is always to fly the preferred path, Rosetta will move to the high-activity trajectory in the event the comet becomes too active as it heats up.
“This will allow science operations to continue besides the initial impact on science planning that such a move would entail,” adds Michael.
.
Rosetta path after 12 November
.
Science takes a front seat
“Science will now take front seat in this great mission. It’s why we are there in the first place!” says Matt Taylor, Rosetta Project Scientist.
“The science teams have been working intensively over the last number of years with the science operations centre to prepare the dual planning for this phase.”
When solar heat activates the frozen gases on and below the surface, outflowing gas and dust particles will create an atmosphere around the nucleus, known as the coma.
First spacecraft to track a comet toward the Sun
Rosetta will become the first spacecraft to witness at close quarters the development of a comet’s coma and the subsequent tail streaming for millions of kilometres into space. Rosetta will then have to stay further from the comet to avoid the coma affecting its orbit.
In addition, as the comet nears the Sun, illumination on its surface is expected to increase. This may provide sufficient sunlight for the DLR-operated Philae lander, now in hibernation, to reactivate, although this is far from certain.
Early next year, Rosetta will be switched into a mode that allows it to listen periodically for beacon signals from the surface.
Quelle: ESA
.
Update: 21.11.2014
.
Philae: Dreiklang aus dem All

SESAME-Instrument CASSE zeichnet Geräusch der ersten Landung auf
Es ist ein kurzer, aber bedeutender "Rumms", den das Instrument CASSE bei der ersten Landung von Philae auf dem Kometen Churyumov-Gerasimenko aufzeichnete - das Zwei-Sekunden-Stück aus dem All dokumentiert nicht weniger als den allerersten Bodenkontakt eines menschengemachten Objekts mit einem Kometen. Die Sensoren sitzen in allen drei Füßen des Landers und lauschten am 12. November 2014 bereits im Anflug auf den Kometen. "Es war ein komplizierter Bodenkontakt, aber wir können die Daten wissenschaftlich auswerten", sagt Dr. Martin Knapmeyer, Geophysiker am Deutschen Zentrum für Luft- und Raumfahrt (DLR) und Mitglied im CASSE-Team.



Der Dreiklang der Lander-Füße ist für die Forscher aufschlussreicher, als es sich für den Laien anhört: "Erst setzt Lander Philae auf einer mehreren Zentimeter dicken, weichen Schicht auf, dann treffen die Füße einige Millisekunden später auf eine harte, vielleicht eisige Schicht auf Churyumov-Gerasimenko", erläutert DLR-Forscher Dr. Klaus Seidensticker, der für das komplette SESAME-Experiment (Surface Electric Sounding and Acoustic Monitoring Experiment) zuständig ist, zu dem auch CASSE gehört.
Lauschen auf den "Touchdown"
Während der Abstiegsphase hatte CASSE (Cometary Acoustic Surface Sounding Experiment) zunächst die Vibrationen des Schwungrads wahrgenommen, das für einen stabilen Flug sorgte. Nach dem ersten Bodenkontakt prallte Philae wieder ab, weil die Harpunen zur Verankerung nicht ausgelöst wurden. "Aus unseren Daten können wir lesen, dass unmittelbar nach dem ersten Abprallen um 16:34:04 Uhr mitteleuropäischer Zeit innerhalb von 30 Minuten keine zweite Landung stattfand", erläutert Planetenforscher Knapmeyer vom DLR. Gemeinsam beispielsweise mit den Daten des ROMAP-Instruments zeigte die Daten-Auswertung noch in der Nacht vom 12. auf den 13. November, dass Philae nach dem ersten "Touchdown" nicht unverzüglich wieder auf den Kometenboden zurücksank.
Insgesamt drei Mal landete Philae, bis er dann um 18.31 Uhr auf der Kometenoberfläche stehenblieb und die nächsten Messungen beginnen konnten. So "hörte" CASSE auch das Hämmern der Thermalsonde MUPUS. Vermutlich wackelte der Lander bei diesem Hämmern leicht und bekam mit verschiedenen Sohlen Kontakt zum Boden, denn das MUPUS-Signal wurde nicht in allen Füßen gleichzeitig von CASSE registriert.
Suche nach Staubpartikeln und Wassereis
Auch die beiden weiteren Instrumente DIM und PP des SESAME-Experiments konnten während den mehr als 60 Stunden Betrieb von Philae messen und Daten zur Erde senden. Die Daten des Instruments DIM (Dust Impact Monitor) lassen nach ersten Auswertungen darauf schließen, dass Churyumov-Gerasimenko an der Landestelle am Rande eines Kraters derzeit nicht aktiv ist - die Wissenschaftler konnten kein einziges Teilchen feststellen. Dies bedeutet, dass sich in der unmittelbaren Umgebung des Kometen wohl nur wenige aufgewirbelte Staubpartikel befinden. Das Instrument PP (Permittivity Probe) schickte von einer der Fußsohlen Wechselströme unterschiedlicher Frequenz durch den Kometenboden und konnte feststellen, dass sich zumindest unter einem Teil von Philae eine größere Menge Wassereis befindet.
Als am 12. November 2014 im Lander-Kontrollzentrum des DLR bereits kurz nach dem ersten Aufsetzen klar war, dass die Harpunen den Lander nicht verankert hatten und Philae sehr wahrscheinlich abgeprallt war, befürchtete DLR-Forscher Dr. Klaus Seidensticker zunächst einen ungünstigen Ausgang der Mission. "Aber jetzt haben wir viel mehr Messdaten, als ich mir zu diesem Zeitpunkt auch nur erhofft hatte."
Quelle: DLR
.
Update: 20.30 MEZ
.
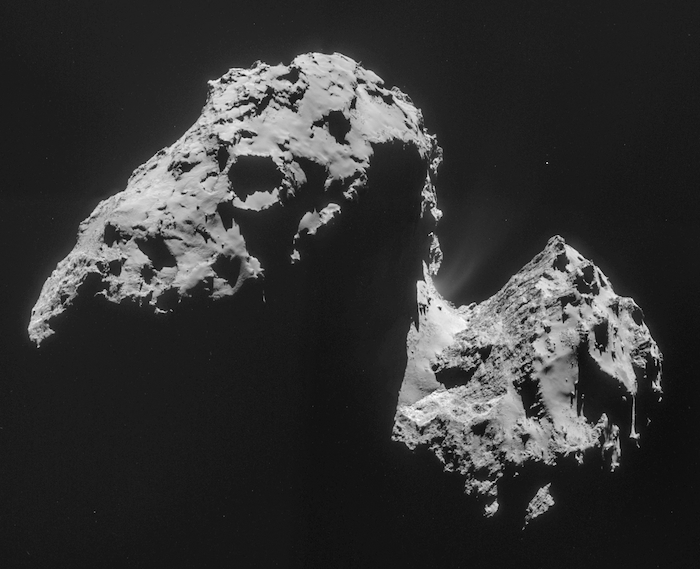
COMETWATCH - 17 NOVEMBER
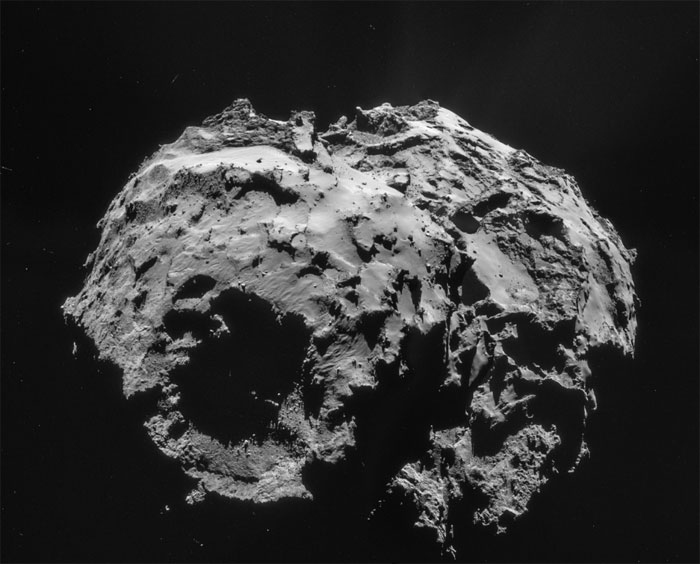
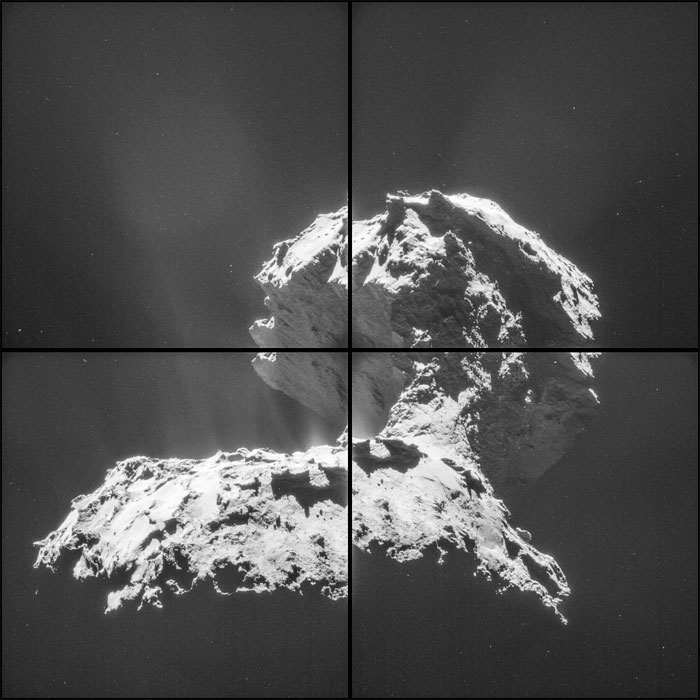
After last week's intense activities centred on Rosetta's lander Philae and its descent to the surface of Comet 67P/Churyumov-Gerasimenko, it's time to take another look at this beautiful comet through Rosetta's navigation camera.
.
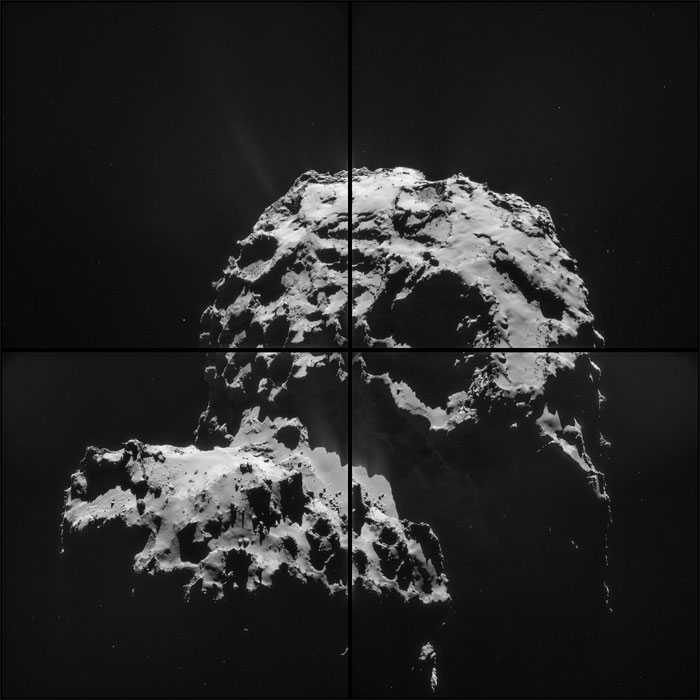
Four image NAVCAM mosaic comprising images of Comet 67P/C-G taken on 17 November. Credits: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0
.
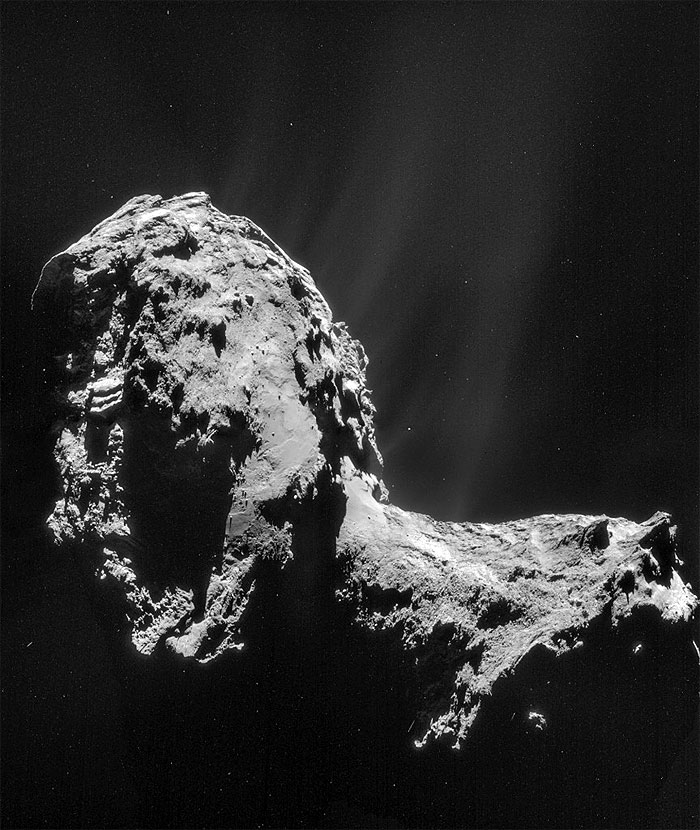
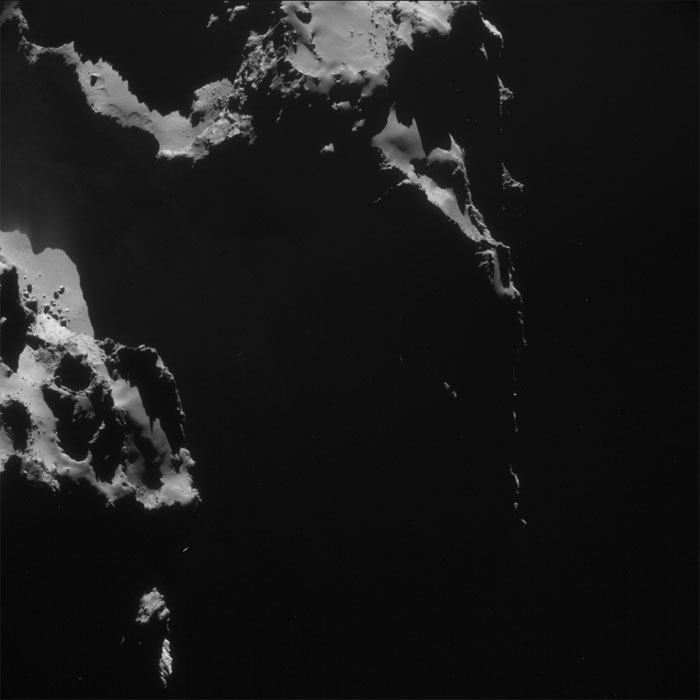
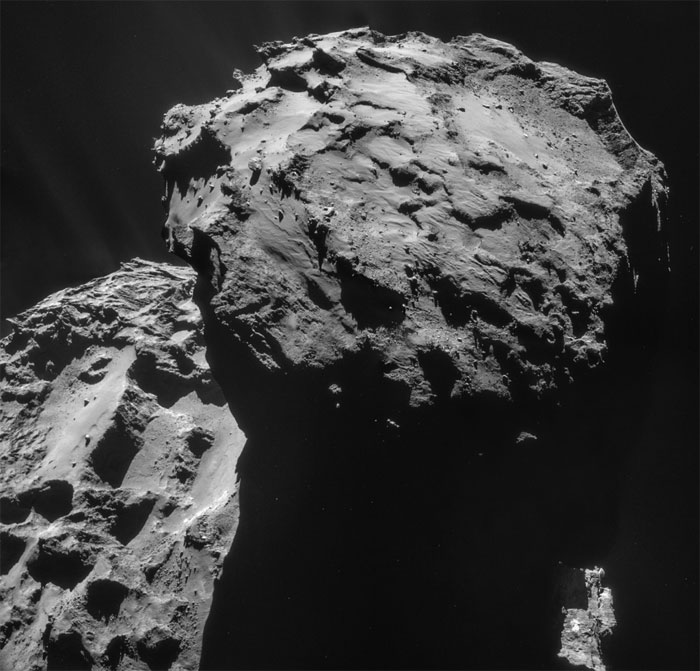
This NAVCAM mosaic comprises four individual images taken on 17 November from a distance of 42.0 km from the centre of Comet 67P/C-G. The image resolution is 3.6 m/pixel, so each original 1024 x 1024 pixel frame measured about 3.7 km across. The mosaic has been cropped (but not rotated) and measures roughly 5.0 x 4.1 km. Some slight contrast enhancement has also been applied.
Due to rotation and translation of the comet during the image taking sequence, making a mosaic involves some compromises. However, as always, the individual images have also been made available below to allow you to check the accuracy of the mosaicing and intensity matching.
Framed between the larger lobe of the comet on the left and the smaller one on the right, the 'neck' of the comet appears in full glory, showing the highly textured cliffs on the smaller lobe, above the neck, and traces of activity stemming from the neck. A number of small white blobs also appear in the image, likely specks of dust or other small objects in the vicinity of the comet.
-
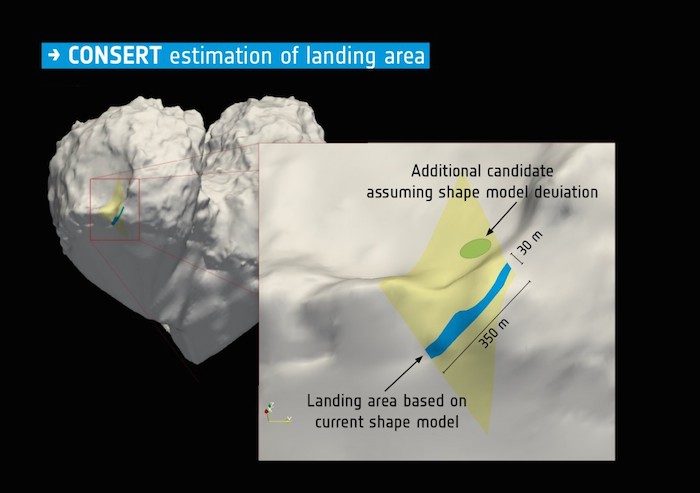
HOMING IN ON PHILAE’S FINAL LANDING SITE
Based on inputs provided by the CONSERT principal investigator Wlodek Kofman, CNRS researcher at the Institut de Planétologie et d'Astrophysique de Grenoble, Grenoble, France.
.
Philae's final landing site, estimated by CONSERT. Credits: ESA/Rosetta/Philae/CONSERT
.
In addition to the on-going visual searches using OSIRIS and NAVCAM images, the CONSERT experiment is helping scientists to locate Philae’s final landing site.
CONSERT, or the Comet Nucleus Sounding Experiment by Radio wave Transmission, is an experiment that works between the Rosetta orbiter and the Philae lander. It works by transmitting radio signals from the orbiter to the lander, and when the geometry is right, the signals pass through the nucleus of the comet, allowing its interior to be analysed.
The signals are received on the lander, where some data is extracted, and then immediately a new signal is transmitted back to the orbiter, where the main experimental data collection occurs. As the radio waves pass through different parts of the cometary nucleus, variations in propagation time and amplitude occur, and these can be used to determine various properties of the internal material and carry out a form of ‘tomography’.
But CONSERT is also being used to help identify the location of the lander, in combination with work performed by ESOC Flight Dynamics, the Philae lander team, the ESA Rosetta Science Ground Segment, and the OSIRIS camera team.
.
By making measurements of the distance between Rosetta and Philae during the periods of direct visibility between orbiter and lander, as well as measurements made through the core, the team have been able to narrow down the search to the strip presented in the image shown above. The determination of the landing zone is dependent on the underlying comet shape model used, which is why there are two candidate regions marked.
Planned high-resolution imaging by OSIRIS will be used to study the CONSERT predicted area.
The CONSERT team also need to know where Philae is before they can fully analyse their scientific data.
.
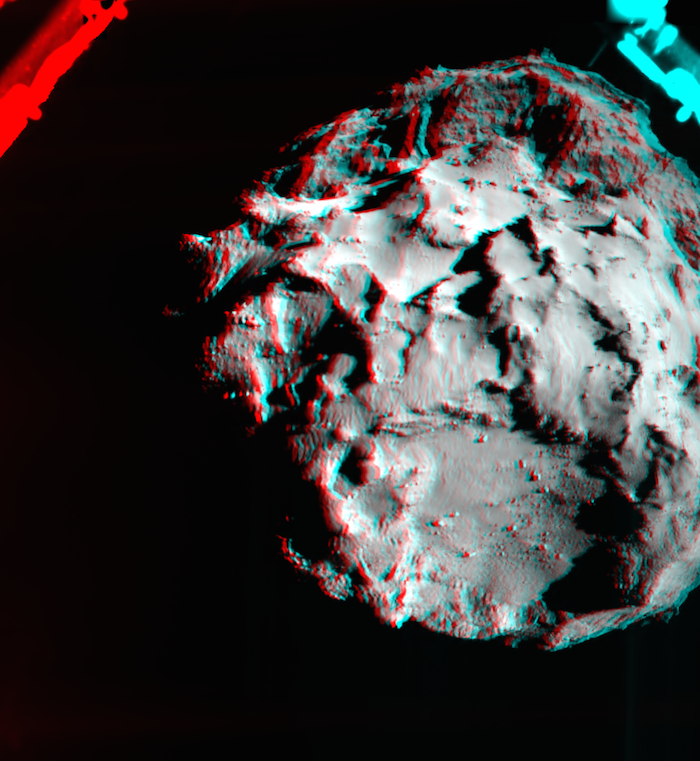
APPROACHING A COMET IN 3D
As Philae approached Comet 67P/Churyumov-Gerasimenko on 12 November 2014, the lander's downward-looking camera ROLIS took images of the descent.
Now the ROLIS team from DLR has used two of them to produce a stereographic image. To appreciate the 3D effect, the image must be viewed with red-blue/green glasses.
.
3D image of Comet 67P/C-G taken during the descent of Philae on 12 November 2014. Credit: ESA/Rosetta/Philae/ROLIS/DLR
This image combines two ROLIS images, acquired about an hour before the first touchdown at 15:34 GMT/16:34 CET (time onboard the spacecraft), which was confirmed on Earth at 16:03 GMT/17:03 CET. The images are separated by two minutes and the resolution is three metres per pixel.
***
The ROsetta Lander Imaging System (ROLIS) was developed by the DLR Institute of Planetary Research in Berlin, Germany, under the leadership of principal investigator Stefano Mottola.
Quelle: ESA
.
Update: 25.11.2014
.
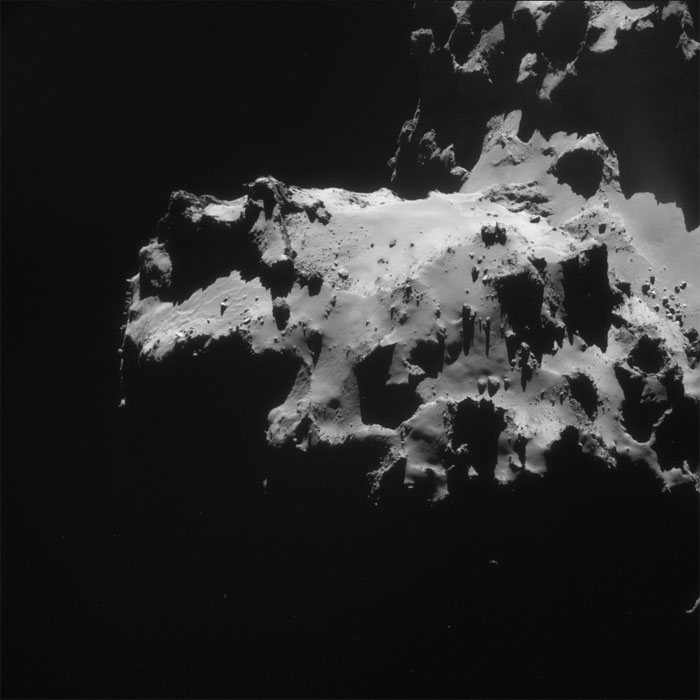
COMETWATCH 20 NOVEMBER
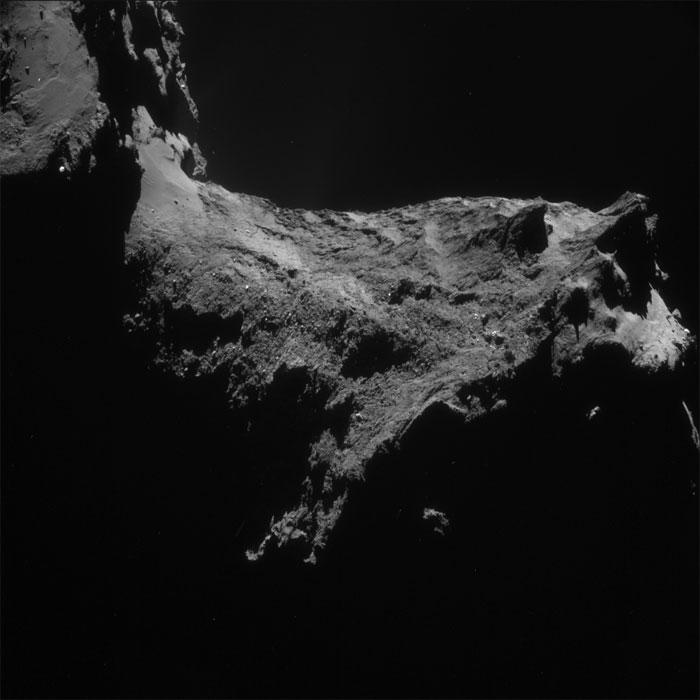
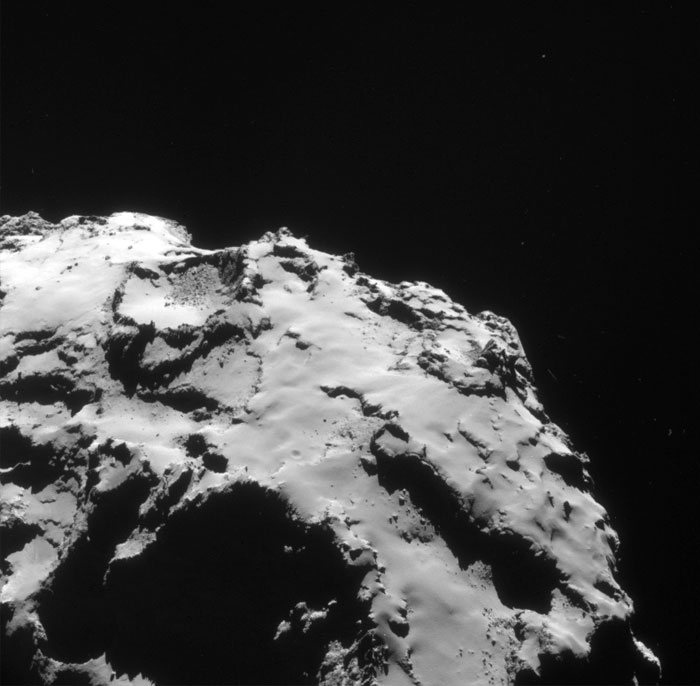
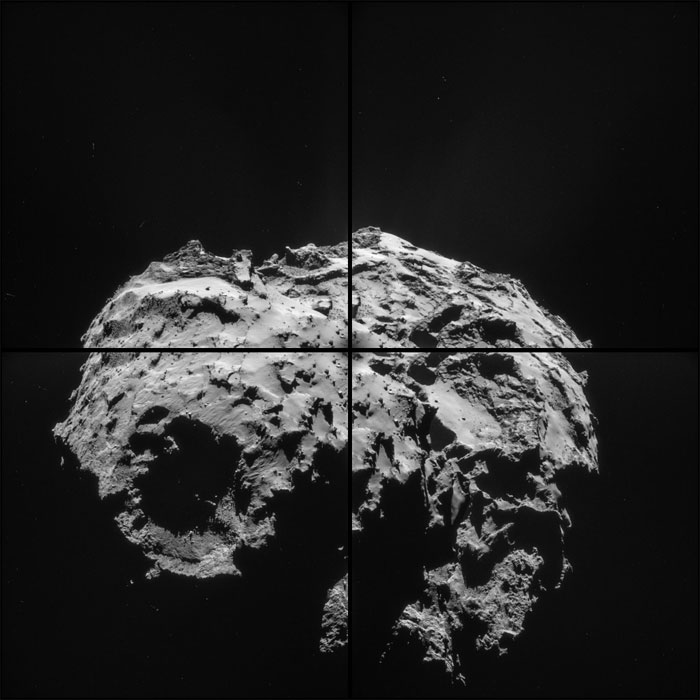
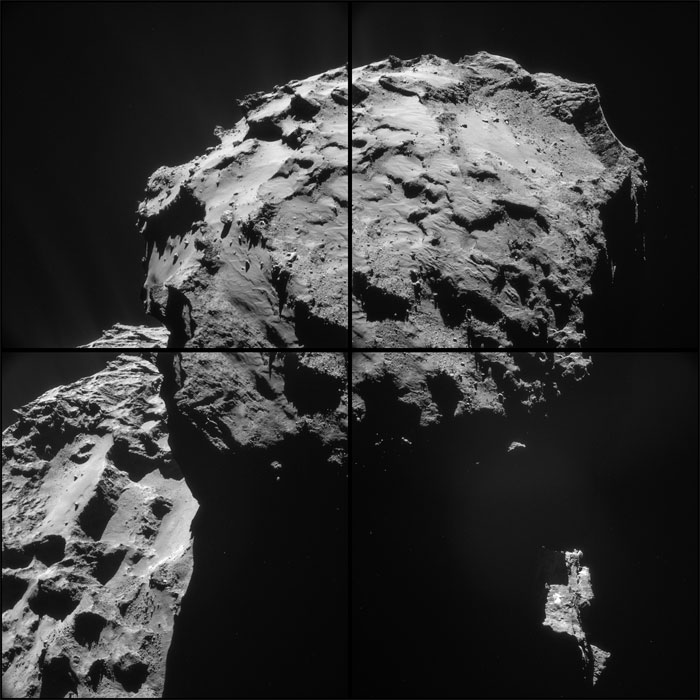
This four-image montage comprises images taken of Comet 67P/Churyumov-Gerasimenko on 20 November, from a distance of 30.5 km from the centre of the comet. The image resolution is 2.59 m/pixel, so each 1024 x 1024 frame measures 2.66 km across. The four images making up the montage are provided at the end of the post.
.
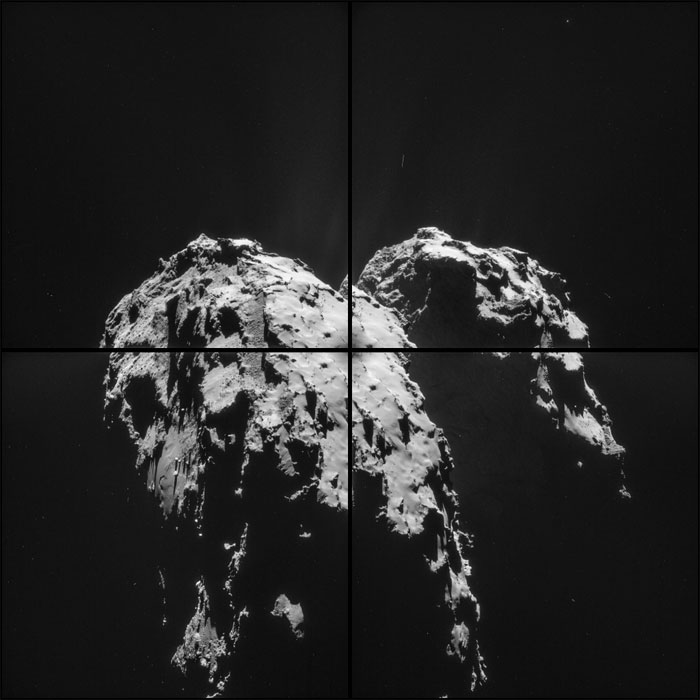
Four image NAVCAM montage comprising images of Comet 67P/C-G taken on 20 November. Credits: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0
The montage has been lightly processed, pushing the contrast a little to bring out some of the shadowed regions. There appear to be some background artefacts due to internal scattering or ghosting that shouldn't necessarily be interpreted as real coma features. The high dynamic range in these images may cause problems in some mosaicking tools. Note that the processing of the raw frames has been updated to eliminate a false grey level offset.
The image montage focuses on the large depression on the smaller of the comet’s two lobes, and includes the region that is the focus of the search efforts for lander Philae. Using the CONSERT experiment that is onboard both Rosetta and Philae, the search is focused on a region close to the rim of the depression (see our previous blog post Homing in on Philae’s final landing site to see the region in question). Higher resolution imaging with the OSIRIS camera is expected to identify the final location of the lander.
The montage shown here also presents part of the ‘dark’ unseen side of the comet, currently cast in shadow because it is facing away from the Sun. As the comet gets closer to and moves around the Sun along its orbit next year (perihelion is on 13 August 2015) then this side will become fully illuminated.
Quelle: ESA
.
Update: 26.11.2014
.
COMETWATCH 20 NOVEMBER - IN THE SHADOW OF THE COMA
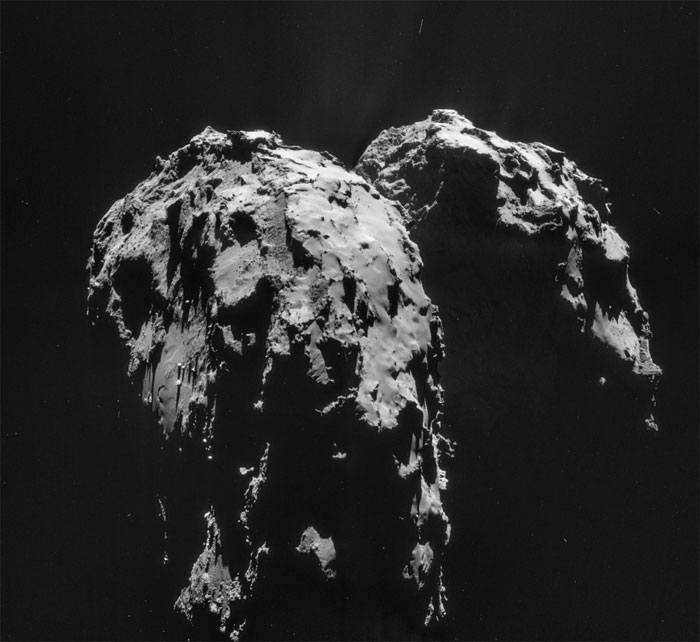
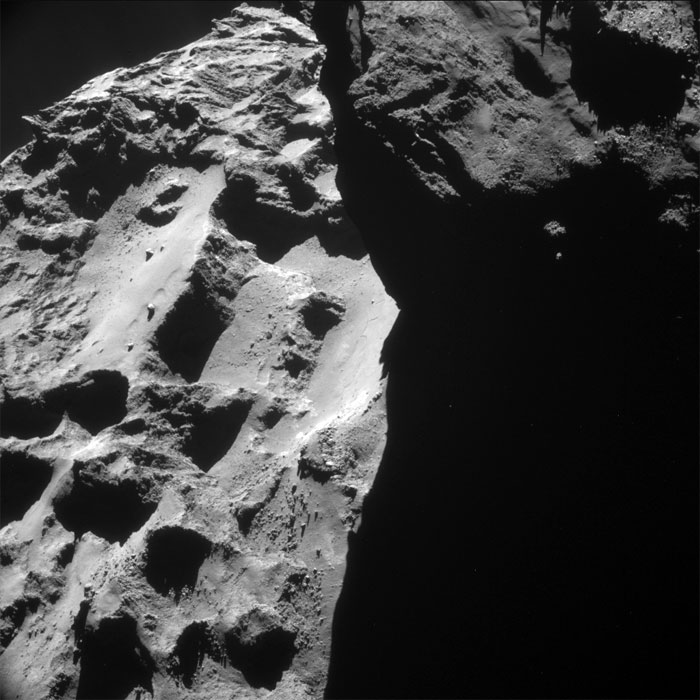
This NAVCAM mosaic comprises four individual images taken on 20 November from a distance of 30.8 km from the centre of Comet 67P/C-G. The image resolution is 2.6 m/pixel, so each original 1024 x 1024 pixel frame measured about 2.7 km across. The mosaic has been slightly rescaled, rotated, and cropped, and measures roughly 4.2 x 5.0 km.
.
Four image NAVCAM mosaic comprising images taken on 20 November. Credits: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0
Due to rotation and translation of the comet during the image taking sequence, making a mosaic involves some compromises, as features change slightly from one image to the next. In addition, scattering in the NAVCAM optics can lead to large-scale intensity artefacts which are difficult to cater for when mosaicing.
Thus, for this set of NAVCAM images, some pre-mosaicing masking and post-mosaicing localised intensity adjustments have been made to reduce the low-level artefacts. By their very nature, these adjustments are not perfect. However, as always, the individual images have also been made available below to allow you to check the accuracy of the mosaicing and intensity matching.
The image shows vast outflows of gas and dust, as well as smaller ‘jets’ stemming from the neck and the larger lobe of the comet, suggesting increased levels of activity since rendezvous in August.
Post-processing in LightRoom was also used to bring out the faint outflows, while retaining the brighter features on the comet. Exceptionally, an increased exposure and contrast version of the mosaic is also provided to give an even better view of the outflowing material.
.
Same as the mosaic above, with increased exposure and contrast. Credits: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0
In particular, at the bottom of the mosaic, the non-illuminated part of the comet stands out as a silhouette against the broader diffuse emission coming from the comet's coma. There are hints of a diffuse 'atmosphere' close to the surface of the comet seen along the illuminated edges, but this could be due to scattering in the NAVCAM optics. The large number of small white blobs in the image are likely specks of dust or other small objects in the vicinity of the comet.
.
Quelle: ESA
.
Update: 27.11.2014
.
Comet landing: UK team's data bonanza from Philae

Like relatives at intensive care, scientists peer through the glass at a monitor (below) showing Philae's dwindling power levels
UK Researchers received "rich" data from the Philae lander just before its power died.

Scientists say they detected what might be complex carbon compounds on the surface of the comet the craft landed on two weeks ago.
The results are from the Ptolemy instrument, which is a miniaturised on-board laboratory.
The detection of carbon supports a view that comets may have brought key chemicals to Earth to kick-start life.
Continue reading the main story
“
Start Quote
Now we have some data and it's: Wow! This is what scientists do this stuff for”
Prof Ian Wright
Open University
The team leader, Prof Ian Wright, told BBC News: "We can say with absolute certainty that we saw a very large signal of what are basically organic (carbon) compounds.
"There is a rich signal there. It is not simple. It is not like there are two compounds; there are clearly a lot of things there - a lot of peaks. Sometimes a complicated compound can give a lot of peaks."
The "peaks" refer to the graph produced by the Ptolemy instrument of the different molecules it detected. The result is in line with initial observations made by a similar German-led instrument on Philae.
In an exclusive interview with BBC News, Prof Wright explained that Ptolemy had gathered huge amounts of scientific data. Normally a quiet, understated man, he was marginally better at containing his enthusiasm than his co-worker and wife, Prof Monica Grady, who jumped for and then wept with joy and relief when Philae landed.
Prof Wright told me: "I am as excited now as I was a couple of weeks ago. It's tremendous!"
.
Tense moments as the Ptolemy team waits to see how much of data will be streamed back from Philae
.
"For years, I've been giving public lectures about what we plan to do. Now we have some data and it's: Wow! This is what scientists do this stuff for."
Much of the data gathered by Ptolemy was collected on the fly. Shortly after the Rosetta spacecraft was activated in January, Prof Wright and his team saw the opportunity to analyse the comet's tail as the spacecraft approached.
"It is not something we had planned to do, but it became obvious that it was something we could do."
The early data suggests that the composition of the gases changed as the spacecraft got closer to the comet.
Prof Wright also explained that Philae's bouncy landing suited his experiment. Among Ptolemy's capabilities is the ability to analyse gases and particles around it, and so it was pre-programmed to sniff its environment shortly after landing.
Pictures from Rosetta show that the first landing created a dust cloud, providing Ptolemy with a feast of data.
But Philae's bouncy landing and eventual resting place in the shade meant that it would not be able to recharge its solar powered batteries. The Ptolemy team had a few hours to rethink its scientific programme and upload a much curtailed set of experiments to the instrument.
Fuelled by the drama of the landing, and feeling the weight of history on their shoulders, all the various Philae instrument teams spent the night feverishly working to make the best use of the precious few days of operating life that the lander had left.
The hardest moment for the Philae team was having to abandon plans to analyse material drilled from underneath the comet's surface. Overall, programme managers deemed that there was only sufficient battery power to drill for one sample, rather than two as was originally planned. A collective decision was therefore made that any sample should be analysed by the German-led COSAC instrument - not Ptolemy.
It is unclear whether the drill successfully managed to get a sample to COSAC.
But mission planners did grant the UK team Philae's last ounce of strength to operate Ptolemy's oven, to heat up all the debris that had collected inside the instrument to 200C and analyse the gases that came off.
Prof Wright confirms that this experiment was successfully carried out and that the results could give an indication of the composition of the carbon and nitrogen on the comet. These results may in turn help piece together what happened in the early years of the Solar System when the planets were forming.
The team wishes that Ptolemy could have carried out its full mission, but Prof Wright says the group is delighted with the results it has obtained. It also has the optimistic possibility of Philae coming back to life in the weeks ahead as the comet moves closer to the Sun and lighting conditions improve at the landing site.
"If you ask me whether we have done all we could have done, the answer is 'no'. But I remain optimistic that the thing may come back to life and we will get the chance to do those things," he said.
Quelle: BBC
.
Update: 28.11.2014
.
DID PHILAE GRAZE A CRATER RIM DURING ITS FIRST BOUNCE?
Based on inputs from ROMAP co-principal investigator Hans-Ulrich Auster from the Technische Universität Braunschweig, Germany.
.
Data collected by ROMAP, the Rosetta Lander Magnetometer and Plasma Monitor onboard Philae, is being used to help reconstruct the trajectory of the lander to its final landing site on Comet 67P/Churyumov-Gerasimenko.
As we described in an earlier blog post, magnetic fields can be used for this task because both the lander and the orbiter generate small magnetic fields of their own due to the electronic circuits inside the spacecraft. These magnetic fields create perturbations in the data that are normally removed in order to analyse the purely natural magnetic fields from the comet and the solar wind. But during the descent of the lander, these perturbations were measured in order to monitor what was happening to the lander as it slowly dropped towards the surface of 67P/C-G.

“Any motion of Philae in a magnetic field – even if it is small – can be seen by field changes in the measured magnetic field direction,” explains ROMAP co-principal investigator Hans-Ulrich Auster from the Technische Universität Braunschweig, Germany.
ROMAP timeline
The scientists have now been able to use ROMAP data to reconstruct the chain of events that took place on 12 November as follows:
- Separation was confirmed as a decay in the magnetic field perturbation as the distance between Philae and the orbiter increased; at this point the lander was spinning at a rate of about 1 rotation per 5 minutes;
- The landing gear was deployed successfully, accompanied by a change in the spin rate to 1 rotation per 8.5 minutes;
- The ROMAP boom was deployed successfully and a magnetic field decay was measured corresponding to the increased distance of the ROMAP sensor with respect to its original position on the lander;
- During the seven-hour descent, all measurements were nominal, and ROMAP recorded the first touchdown at 15:34:04 GMT spacecraft time (the signal arrived on Earth just over 28 minutes later, and was confirmed at 16:03 GMT);
- After the first touchdown, the spin rate started increasing. As the lander bounced off the surface, the control electronics of the flywheel were turned off and during the following 40 minutes of flight, the flywheel transferred its angular momentum to Philae. After this time, the lander was now spinning at a rate of about 1 rotation per 13 seconds;
- At 16:20 GMT spacecraft time the lander is thought to have collided with a surface feature, a crater rim, for example.
.
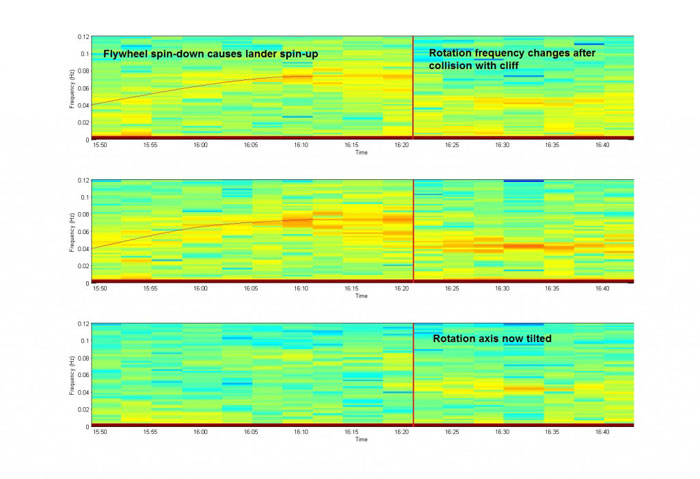
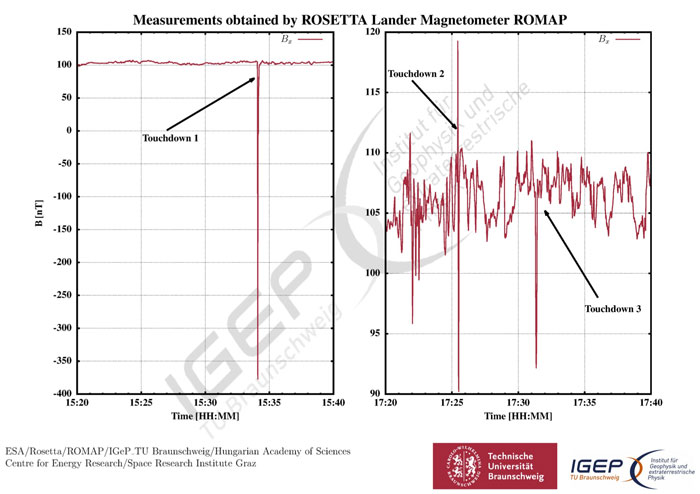
Dynamic power spectral density plot describing the intermediate ‘touch’ that Philae experienced between the first and second touchdowns. See text for details. Credits: ESA/Rosetta/ROMAP/IGeP_TU/Braunscheig/Hungarian Academy of Sciences/Centre for Energy Research/ Space Research Institute Graz
“It was not a touchdown like the first one, because there was no signature of a vertical deceleration due to a slight dipping of our magnetometer boom as measured during the first and also the final touchdown," says Hans-Ulrich. “We think that Philae probably touched a surface with one leg only – perhaps grazing a crater rim – and after that the lander was tumbling. We did not see a simple rotation about the lander’s z-axis anymore, it was a much more complex motion with a strong signal in the magnetic field measurement.”
- Following this event, the main rotation period had decreased slightly to 1 rotation per 24 seconds;
- At 17:25:26 GMT Philae touched the surface again, initially with just one foot but then all three, giving the characteristic touchdown signal;
- At 17:31:17 GMT, after travelling probably a few more metres, Philae found its final parking position on three feet.
Understanding the dynamic power spectral density plot
The plot shown above describes the intermediate ‘touch’ that Philae experienced between the first and second touchdowns. The three panels represent, from top to bottom, the x, y and z components of the lander, respectively. The colour denotes the power that is carried by the frequency. For example, red is more “energetic” than blue.
The thin red line in the x and y components traces the increase in frequency (seen as the orange patches) as the spin down of the flywheel caused the lander to spin up, preserving momentum. If there was no contact with the ground this momentum should have been preserved indefinitely (there is almost no atmosphere to cause significant friction) and the frequencies should have remained almost constant after the flywheel transferred all of its energy to the lander. (Note that because the flywheel was off and the moments of inertia of Philae do not completely coincide with the lander x,y,z axis, a slight decay of this rotation frequency can be seen at about 16:15 (GMT spacecraft time), which could indicate a small tilting of the rotation axis.)
But at about 16:20 there is a sudden change in the rotation frequency, visible in all three components, and marked on the plot as a thick vertical red line. Here the rotation frequency visible in the x- and y-component drops significantly, but now there is a rotation visible in the z-component instead (yellow and orange patches). This indicates a sudden and dramatic change of the rotation axis that can only be explained by a collision with the ground to provide a pivoting point for the lander to change its rotation axis.
.
Magnetic field (B) measurements obtained by Philae's ROMAP instrument indicate the three touchdowns. Time is in GMT spacecraft time. (See image for credit line.)
A bumpy start, but a happy ending
Despite this bumpy start to its life on the comet, all of Philae’s instruments were operated in the following two days. Recent blog entries describe preliminary results from MUPUS, SD2, and SESMAE, but a comprehensive scientific analysis of the data from all instruments is now underway.
“It was really an exciting and almost unbelievable excursion,” adds Hans-Ulrich.
The search for Philae’s final landing spot is still on, and the ROMAP data are being used with other instrument data from both Philae and Rosetta to try to reconstruct the lander’s full trajectory and to identify its current location (see the recent blog posts from the CONSERT team and from the OSIRIS team for further details).
And while Philae is now hibernating, hopes remain high that it will receive enough sunlight later in the mission to continue studying Comet 67P/Churyumov-Gerasimenko from the surface. At the same time, the Rosetta orbiter continues monitoring the comet from orbit – it is currently about 30 km from the comet, and will continue to study it as it bursts into life ahead of its closest approach to the Sun in August 2015.
ROMAP
The contributing institutions to ROMAP are: Institut für Geophysik und Extraterrestrische Physik, Technische Universität Braunschweig, Germany; Max-Planck Institut für Sonnensystemforschung, Göttingen, Germany; Hungarian Academy of Sciences Centre for Energy Research, Hungary; and Space Research Institute Graz, Austria. The principal investigators are Hans-Ulrich Auster (Technische Universität, Braunschweig) and István Apáthy, KFKI , Budapest, Hungary.
---
COMETWATCH 26 NOVEMBER
This four-image montage comprises images taken on 26 November from a distance of 30.1 km from the centre of 67P/Churyumov-Gerasimenko. The image resolution is 2.4 m/pixel so each original 1024 x 1024 pixel frame measures about 2.5 km across.
.
Four image NAVCAM montage comprising images taken on 26 November. Credits: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0
A quick look at the lower-left and lower-right images (first and last in the sequence) will rapidly reveal that the rotation of the comet has been substantial in the twenty minutes that passed between the two images being taken, meaning that mosaicking tools are likely to introduce some serious artefacts. For example, look at how the shadows have changed around the distinctive U-shaped feature close to the boundary between the two lower frames.
The comet continues to show outflows of gas and dust, which are even more evident in the higher contrast version of the montage provided below. This higher contrast version also brings out the details of some of the shadowed regions, such as the steep cliffs that rise up to the large depression on the smaller of the comet’s two lobes.
The higher contrast montage also highlights some scattering artefacts (e.g. the rounded feature in the top left frame) and vignetting (centre of the montage).
.
Higher contrast version of the 26 November montage. Credits: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0
Quelle: ESA
.
Update: 1.12.2014
.
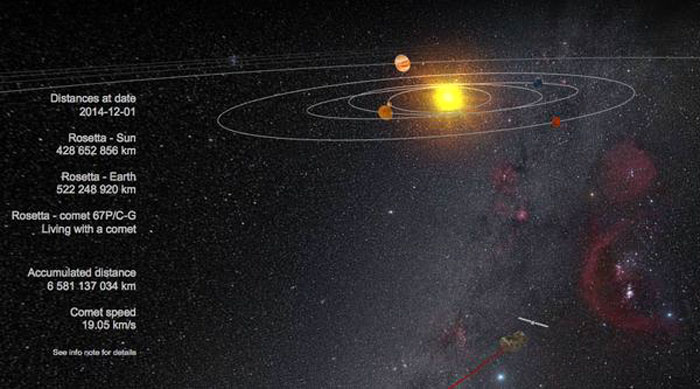
Today [1 Dec] I'm 429 million km from the Sun & 522 million km from Earth; one way signal travel time: 29min 2secs.
.
-
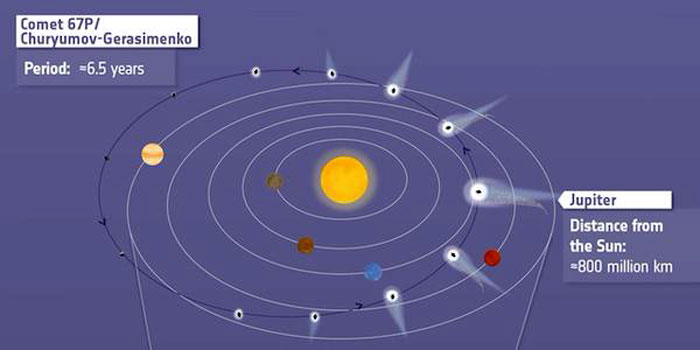
Closest #67P gets to Sun is 186 million km = between orbits of Earth & Mars, on 13 Aug ‘15
Quelle: ESA
.
Update: 2.12.2014
.
COMETWATCH 30 NOVEMBER
This four image montage comprises images taken with Rosetta’s NAVCAM on 30 November from a distance of 30.2 km from the centre of Comet 67P/Churyumov-Gerasimenko. The image resolution is 2.6 m/pixel and each original 1024 x 1024 pixel frame measures just over 2.6 km across.
.
Four image NAVCAM montage comprising images taken on 30 November 2014. Credits: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0
.
In this orientation, the smaller of the two comet lobes is in the lower left of the montage, with the larger lobe occupying the upper frames as well as the lower right frame, albeit mostly cast in shadow.
The view affords a particularly nice view down onto the ‘neck’ region of the comet, where low plateaus of material with layered walls appear to rise from the smoother material that surrounds them. Similarly, some of the boulder-like features seen in the foreground of the scene have the appearance of being exposed from the underlying surface, partially covered by the finer-grained material.
In the far left of the lower left frame, this fine-grained material appears to have been shaped into a beautiful rippled pattern; perhaps as result of the underlying topography and/or due to differences in erosion by sublimation across the surface.
Due to rotation and translation of the comet during the image-taking sequence, it is again difficult to make an accurate mosaic of this set. Evidence for this can be seen in the neck region, where the shadows and fraction of the boulder field visible have clearly changed between the first (lower-left) and last (lower-right) images.
Also, stretching the contrast reveals some details in the shadowed regions, as well as some fine jet-like structures from the upper limb of the main body. But at high contrast, internal scattering in the NAVCAM optics also becomes apparent, in the form of large-scale diffuse blobs. These also make it difficult to mosaic well.
.
.
.
Quelle: ESA
.
Update: 4.12.2014
.
COMETWATCH – 1 DECEMBER
This four image mosaic comprises images taken with Rosetta’s NAVCAM on 1 December from a distance of 30.1 km from the centre of Comet 67P/Churyumov-Gerasimenko. The image resolution in the mosaic is 2.4 m/pixel and after cropping, it measures 3.8 x 3.5 km. The individual 1024 x 1024 frames, which are provided at the end of this post, measure 2.6 km across.
.
Four image NAVCAM mosaic comprising images taken on 1 December 2014. Credits: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0
In this orientation, the smaller of the two comet lobes is towards the upper right of the scene, with the larger lobe in the lower left.
As ever, due to rotation and translation of the comet during the image taking sequence, making a mosaic involves some compromises, as features change slightly from one image to the next. For example, in this mosaic, there is an obvious flaw at the ‘join’ between the images connecting the large lobe (in the foreground) and the smaller lobe (in the background).
There was enough of a shift between the top-left and top-right images to make the match here difficult, resulting in some minor feature and intensity mismatches. The small distortion correction made in the mosaicking process also changed the scale of the image slightly. Thus, as usual, before interpreting the mosaic, do check the original frames, and/or the montage below.
.
Four image NAVCAM montage comprising images taken on 1 December 2014. Credits: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0
The view around the horizon in the upper frames is particularly striking, with cliffs, ridges and spires contributing to the dramatic scenery.
The familiar site that includes the Cheops boulder can be seen in the centre of the lower left frame in this montage, with long shadows cast onto the surrounding plain.
A similar viewing angle was seen during the close 10 km orbit – click here to revisit this entry.
Rosetta is now currently en route to a 20 km circular orbit around the comet, where it will operate for around ten days before returning to the 30 km orbit.
.
Quelle: ESA
.
Update: 6.12.2014
.
COMETWATCH 2 DECEMBER
This four image mosaic comprises images taken with Rosetta’s NAVCAM on 2 December from a distance of 30.1 km from the centre of Comet 67P/Churyumov-Gerasimenko. The image resolution of the mosaic is about 3.1 m/pixel, and it has been cropped to measure 4.5 x 3.6 km.
.
Four image NAVCAM mosaic comprising images taken on 2 December 2014. Credits: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0
Each original 1024 x 1024 pixel frame (provided below) has a scale of 2.6 m/pixel and measures nearly 2.6 km across.
-
As usual, before interpreting the mosaic, do check the original frames, because the rotation and translation of the comet during the image sequencing makes it difficult to create an accurate mosaic. In this particular instance, some distortions were needed in order to get the images to align, which also resulted in the slightly different image scale.
.
In this orientation, the smaller of the two comet lobes is towards the left, the larger lobe towards the right.
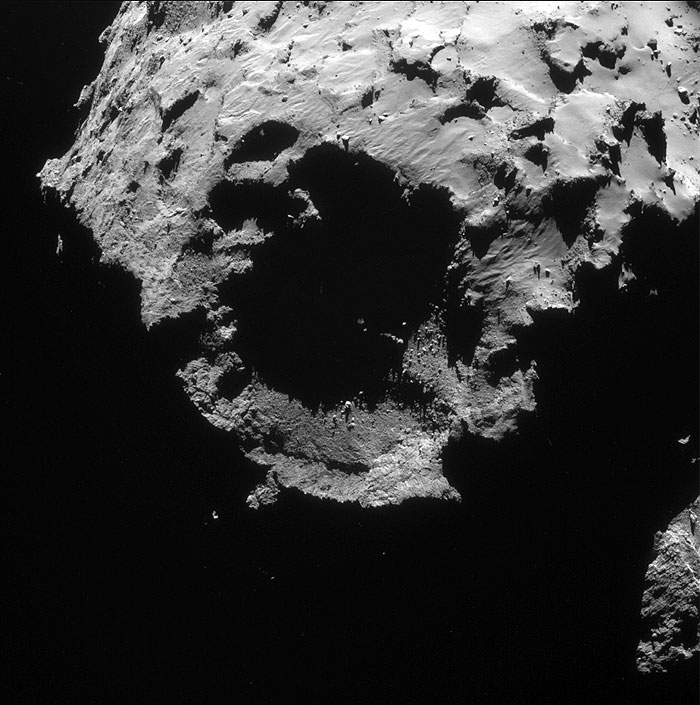
It provides an almost “face-on” view onto the large depression on the smaller lobe, its boulder-strewn surface albeit enshrouded in shadow. On the other hand, the internal walls are seen in quite some detail. It is thought that Philae’s final touchdown site might be located close to the rim of this depression but further high-resolution imaging is still being obtained and analysed to confirm this. This depression, measuring almost 1 km across, was once considered as candidate landing site B.
This orientation also provides a good view onto the plateau that was previously considered as candidate landing site A – close to the ‘join’ between the two right-hand side images frames. The dark circular region is a large pit. The cliff walls that drop down onto this plateau seem to show slightly brighter sections, perhaps reflecting compositional differences, or fresher material that has yet to be degraded by exposure to the space environment.
.
Quelle: ESA
.
Update: 9.12.2014
.
COMETWATCH 7 DECEMBER
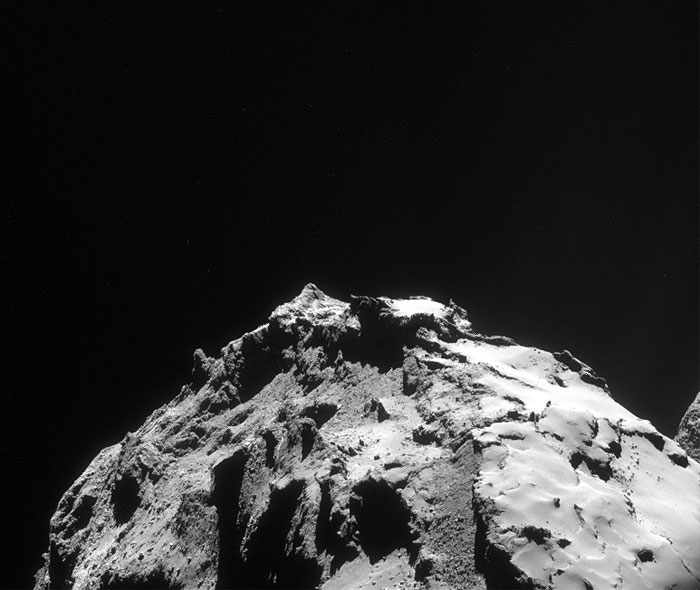
This four-image mosaic comprises images taken by Rosetta’s NAVCAM on 7 December from a distance of 19.7 km from the centre of Comet 67P/Churyumov-Gerasimenko.
.
Four image NAVCAM mosaic comprising images taken on 7 December 2014. Credits: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0
.
The image scale is 1.68 m/pixel and each single 1024 x 1024 frame measures 1.7 km across. The mosaic has been cropped and measures 3.2 x 3.1 km, at roughly the same scale per pixel.
As usual, before interpreting the mosaic, do check the original frames (provided below), because the rotation and translation of the comet during the image sequencing makes it difficult to create an accurate mosaic. In this particular instance, some distortion terms were introduced to make the mosaic, albeit still leaving a slight mismatch error at one of the peaks on the top edge of the mosaic.
Internal scattering in NAVCAM also leads to some spurious broad intensity features and thus some cleaning has been applied to lower the impact of the scattering and make the boundaries between images continuous. So, be cautious in pushing the intensities too far to look at very faint features: there will be some artefacts.
.
Montage of the 7 December NAVCAM images Credits: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0
.
The scene shows a great side-on view of the inside rim of the large depression on the smaller of the comet’s lobes (far top right). This viewing angle highlights two different surface textures visible inside the depression – the right hand side (in this orientation) seemingly dominated by rougher terrain and the majority of boulders, while the left hand side is apparently much smoother. Finally, streams of dust and gas can be seen rising from both the large (lower left) and small (upper right) lobes of the comet.
.
.
Quelle: ESA
5146 Views