
21.01.2024
Japan lands on Moon but glitch threatens mission

Artwork of the two deployed rovers: A hopper (L) and a rolling, shape-shifting ball (R)
Statistically, it's proven very hard to land on the Moon. Only about a half of all attempts have succeeded.
Jaxa put its faith in new precision-navigation technologies.
The lander's onboard computer used rapid image processing and crater mapping to avoid hazards to reach its touchdown point.
Engineers had wanted to get within 100m (330ft) of their targeted location and will now be studying data to see how well Slim performed. But the early indications are that the technologies worked as designed.
"Looking at the trace data, I believe that Slim most certainly achieved a pinpoint landing with 100m accuracy. Of course, as we informed you in advance, it would take about a month to analyse the information accurately," Mr Kuninaka said.
Slim began its descent manoeuvres from an altitude of 15km (9 miles) at midnight into Saturday, Japan Standard Time (15:00 GMT, Friday). Touchdown occurred just after 15:20 GMT.
The landing location, near Shioli Crater, is currently bathed in sunlight but the darkness of lunar night will return there at the end of the month.
When that happens, temperatures will plummet to levels that are very capable of breaking electronic circuit boards.
Jaxa has twice landed robots on asteroids, so this Moon touchdown is another feather in its cap.
It will be playing significant roles in the US space agency's (Nasa) Artemis programme, which seeks to put humans back on the lunar surface after a gap of more than half a century.
Last year, a private Japanese company, iSpace, had a go at landing. Its Hakuto-R craft crashed when the onboard computer became confused about its altitude above the Moon.
On Thursday, the private American company Astrobotic disposed of its Peregrine landing craft in Earth's atmosphere. A propulsion fault prevented it from even trying to make a touchdown attempt.
Dr Simeon Barber from the UK's Open University had instrumentation on Peregrine.
He saluted the Japanese effort.
"For me, this was all about precision landing. That's a huge Success. I'd be really happy if I was them," he told BBC News.
"We're in an era of a lot of lunar missions happening with lots of different players. If we collate all this knowledge, that all these players are gaining through these attempts - whether successful or not - then we learn as a community how to put missions together more successfully in the future."
Likewise, Dr Emma Gatti, from the digital magazine SpaceWatch Global, said Japan had much to celebrate: "It's historic for them; it is a matter of prestige. It is important for Japan as a country; it's important for all the investment they have made - proof that it can be done by a country not as big as China or US."
Quelle: BBC
+++
JAXA says lunar probe landing flawed, cites solar panel glitch
SAGAMIHARA, Kanagawa Prefecture--Something was clearly amiss when Shinichiro Sakai, project manager for Japan’s daring moon mission, was a no-show at a news conference called in the wee hours of Jan. 20.
Instead, Hitoshi Kuninaka, head of the Institute of Space and Astronautical Science (ISAS), handled the media at the 2:10 a.m. gathering to report on progress in the Smart Lander for Investigating Moon (SLIM) probe. ISAS is an arm of the Japan Aerospace Exploration Agency (JAXA).
“The probe made a successful soft landing on the moon. It has begun transmitting signals back to Earth and is generally operating soundly,” Kuninaka said.
He added that two small robot vehicles had been released from the probe.
Kuninaka tried not to let it show, but he was gloomy because the solar panels on the probe were not operating properly.
The SLIM probe made a near-perfect soft landing on the lunar surface while calculating possible risks from cameras mounted on the spacecraft.
At mission control, technicians could only monitor the data streaming into the various displays that showed the altitude of the probe, its acceleration and revolution as well as what the engine was doing.
At 12:20 a.m., the data showed the probe’s altitude was approaching zero, meaning it was almost on the lunar surface. The engine had stopped firing short bursts of power, and another display showed the probe was in lunar landing mode.
The ISAS’s Yasuhiro Kawakatsu was providing technical explanations to media representatives gathered at JAXA’s Sagamihara campus.
“The data shows the probe landed and is stable,” Kawakatsu said.
And that was it, as far as explanations went about the lunar landing, for the next two hours or so.
The solar panels did not unfold properly, restricting power to its battery cells, because the probe tilted upon landing.
Kuninaka said project staff were trying to analyze and interpret the data pouring in.
JAXA officials switched the probe to battery mode to capture images taken during the flight to the moon until that battery ran out of juice. As Sakai was overseeing the data transfer, he stayed away from the news conference room.
When a reporter asked why JAXA officials were not happier about Japan becoming only the fifth nation to successfully land a probe on the moon, Masaki Fujimoto, ISAS’s deputy head, said: “That would be difficult under the present circumstances. If things had gone according to plan, I would be smiling now, but I need to know the condition (of the probe) as soon as possible.”
The lack of solar power generation threatens to compromise the probe’s mission to possibly just a few hours instead of several days.
There was still the possibility that a change in the sun’s position might fire up the solar panels and stir the probe back into full operation.
Quelle: The Asahi Shimbun
----
Update: 24.01.2024
.
Not dead yet: Japan prepares for possible recovery of SLIM moon lander
'If sunlight begins to shine on the lunar surface from the west, there is a possibility of generating power, and we are preparing for recovery.'

Japan's first successful moon lander may still have some life left in it.
The pioneering spacecraft, called SLIM ("Smart Lander for Investigating Moon"), touched down on the lunar surface on Friday (Jan. 19), making Japan the fifth nation to join the moon-landing club.
But SLIM didn't get up and running as planned. Its solar panels failed to generate electricity on the surface of the moon, leaving the lander's future in serious doubt, officials with the Japan Aerospace Exploration Agency (JAXA) announced shortly after the historic landing.
That was pretty much all we knew about SLIM's status until early Monday morning (Jan. 21), when JAXA gave us another update. And the news was relatively encouraging: The lander has not been declared dead, and its handlers are working toward a possible recovery.
When SLIM's battery power dipped to 12% capacity on the lunar surface, the lander powered down intentionally "to avoid being unable to restart for a recovery operation due to over-discharge," team members explained early Monday via the mission's account on X.
"According to the telemetry data, SLIM's solar cells are facing west. So if sunlight begins to shine on the lunar surface from the west, there is a possibility of generating power, and we are preparing for recovery. #SLIM can operate with power only from the solar cells," the team said in a separate X post on Monday.
SLIM successfully beamed home technical data and imagery collected during Friday's descent and landing, the team added in another Monday X post.
We should learn much more at the end of the week, when SLIM's handlers plan to offer another status update and provide an overview of the data analyses that have been performed to date, team members said.
"Although the attitude after landing did not go as planned, we are glad we could achieve so much and are happy to have landed successfully. We're also excited to analyse the data," the SLIM team said in yet another Monday-morning X post.
SLIM is a demonstrator tasked primarily with proving out the technology required for super-precise lunar landings, which explains its "Moon Sniper" nickname. The probe aimed to land within 330 feet (100 meters) of a designated spot on the rim of the moon's Shioli Crater.
The probe launched in September 2023along with an X-ray space telescope called XRISM, which deployed into low Earth orbit and recently beamed home its first test images.
SLIM reached lunar orbit on Christmas Day and made its historic landing on Friday. JAXA has not yet announced whether the probe hit its landing target; presumably, we'll hear more about that in the coming update.
SLIM also carried two mini-rovers, called LEV-1 ("Lunar Excursion Vehicle" 1) and LEV-2. Both of these little robots deployed as planned, and LEV-1 was known to be operating on the lunar surface, JAXA officials said on Friday shortly after the landing.
The other four nations that have soft-landed a spacecraft on the moon are the Soviet Union and the United States, both of which first did so during the Cold War space race; China, which first hit the gray dirt in 2013; and India, which joined the club in August 2023 with its Chandrayaan-3 mission.
Quelle: SC
----
Update: 25.01.2024
.
Japanische Sonde schickt erste Fotos vom Mond
Japan hat es auf den Mond geschafft: Die Weltraumbehörde Jaxa veröffentlichte am Donnerstag erste Bilder ihrer Weltraumsonde Slim, abgekürzt für „Smart Lander for Investigating Moon“ (dt.: intelligente Raumsonde zur Erforschung des Mondes).
Nach zwei gescheiterten Versuchen ist Japan die Landung auf dem Mond gelungen. Die japanische Raumfahrtbehörde hatte zwar eine Präzisionslandung auf einem Asteroiden geschafft, doch auf dem Mond ist die Herausforderung wegen der stärkeren Schwerkraft größer.
Damit ist Japan die fünfte Nation, der eine Mondlandung gelingt, nach den USA, der Sowjetunion, China und Indien.
Kurz nach der erfolgreichen Landung am Samstag gab es Probleme mit der Stromversorgung, die Batterie hatte nur noch 12 Prozent. Slim wurde sicherheitshalber abgeschaltet.
Vorher konnten die Japaner jedoch Daten und Fotos herunterladen, die beim Landeanflug und nach der Landung auf der Mondoberfläche aufgenommen wurden.
Die Fotos zeigen u. a. die gelbe, kastenförmige Raumsonde auf der felsigen Mondoberfläche, umgeben von flachen Hügeln. Dem Raumfahrzeug sei „eine punktgenaue weiche Landung gelungen“, so Jaxa.
+++
Von einem verformbaren Mondroboter
Es gelang, Daten des Small Lunar Lander Demonstrator (SLIM) zu fotografieren und zu übertragen.
25. Januar 2024 (Reiwa 6)
Japanische Agentur für Luft- und Raumfahrtforschung
Takara Tomy Co., Ltd.
Sony Group Corporation
Doshisha-Universität
Japan Aerospace Exploration Agency (Vorsitzender: Hiroshi Yamakawa), Takara Tomy Corporation (Präsident und COO: Kazuhiro Kojima), Sony Group Corporation (Representative Executive Officer, Chairman und CEO: Kenichiro Yoshida), Doshisha University (Der verformbare Mondroboter (Lunar Excursion Vehicle). 2 (LEV-2), Spitzname „SORA-Q“, im Folgenden „LEV-2“), gemeinsam entwickelt von vier Parteien, darunter Universitätspräsidentin Asako Ueki, ist ein kleines Demonstrationsfahrzeug für die Mondlandung. (SLIM, im Folgenden „SLIM“ genannt ")*2 wurde erfolgreich fotografiert. Damit wird LEV-2 zusammen mit dem ultrakleinen Monderkundungsrover (Lunar Excursion Vehicle 1 (LEV-1), im Folgenden „LEV-1“ genannt)*3 Japans erster*4 Roboter zur Mondoberflächenerkundung und die weltweit ersten*4. 4 vollständig autonomen Roboter zur Erkundung des Mondes und die weltweit ersten*4 gleichzeitige Erkundung der Mondoberfläche durch mehrere Roboter. Darüber hinaus hat sich LEV-2 zum weltweit kleinsten und leichtesten*4 Roboter zur Erkundung der Mondoberfläche entwickelt.
LEV-2 wurde zusammen mit LEV-1 auf SLIM geladen und am 20. Januar 2024, kurz vor der Landung von SLIM, zusammen mit LEV-1 auf die Mondoberfläche entlassen. Danach wird LEV-2 Bilder des SLIM und der Umgebung aufnehmen, und die Bilder werden mithilfe des Kommunikationsgeräts von LEV-1 auf den Boden übertragen und veröffentlicht.

Bilder der Mondoberfläche, aufgenommen und übertragen von LEV-2 „SORA-Q“
(Quelle: JAXA/Takara Tomy/Sony Group Corporation/Doshisha University)
Bei diesem Bild handelt es sich um ein Testbild, das durch die Übertragung von Testfunkwellendaten von LEV-1- und LEV-2-Radiosendern erhalten wurde.
Dieses Bild wurde über LEV-1 auf den Boden übertragen und es wurde bestätigt, dass die Kommunikationsfunktion zwischen LEV-1 und LEV-2 normal funktionierte. Da LEV-2 im gelagerten Zustand aus seinem kugelförmigen Zustand verformt wurde, konnten wir außerdem bestätigen, dass es nach der Freigabe aus SLIM erfolgreich auf der Mondoberfläche eingesetzt und gefahren wurde. Darüber hinaus nutzte LEV-2 unter autonomer Steuerung einen Bildverarbeitungsalgorithmus, um aus mehreren Bildern, die mit der optischen Bordkamera aufgenommen wurden, qualitativ hochwertige Bilder auszuwählen, die im Sichtfeld des SLIM lagen, und schickte sie dann. Das weiß sie auch.
Wir analysieren derzeit weitere Daten, darunter Fahrtenprotokolle, und planen, die Ergebnisse in Zukunft zu veröffentlichen.
Der LEV-2 „SORA-Q“, der durch die Kombination von Spielzeugtechnologie, neuester Sensorrobotiktechnologie und der Weltraumtechnologie von JAXA entwickelt wurde und über hervorragende autonome Betriebs- und Bewegungseigenschaften verfügt, wurde als weltweit kleinster und erster Japans angekündigt Mit dem Mondroboter konnten wir erfolgreich SLIM-Bilder aufnehmen, eine große Leistung. Wir möchten allen Unternehmen und Institutionen, die an der Forschung und Entwicklung beteiligt waren, sowie den vielen Menschen, die uns unterstützt und unterstützt haben, unseren herzlichen Dank aussprechen.
Dieses Jahr ist es das zehnte Jahr, seit der Space Exploration Innovation Hub mit Unternehmen aus ganz Japan zusammenarbeitete und mit der Forschung und Entwicklung für den Mond begann. Viele neue Technologien zur Erkundung der Mondoberfläche, die es nur in Japan gibt, werden entwickelt, und es ist der Beginn einer neuen Mondära, mit der Hoffnung auf einen Erfolg Japans nach LEV-2.
Ich freue mich sehr, dass der LEV-2 SORA-Q einen wichtigen Beitrag zur Mission der punktgenauen Landung des kleinen Mondlander-Demonstrators SLIM leisten konnte. Damit war SORA-Q der erste japanische Roboter, der auf dem Mond landete und Fotos machte. Dieser Erfolg ist allen Beteiligten und allen zu verdanken, die uns bei der gemeinsamen Verwirklichung unserer Träume unterstützt haben. Ich danke Ihnen von ganzem Herzen.
Ich hoffe, dass der Erfolg dieses SORA-Q-Projekts Kinder auf der ganzen Welt dazu inspirieren wird, sich für Naturwissenschaften zu interessieren, und gleichzeitig hoffe ich, dass der Erfolg dieses SORA-Q-Projekts Kinder auf der ganzen Welt inspirieren wird sich für die Naturwissenschaften zu interessieren. Wir hoffen, dass Ihnen dies die Möglichkeit gibt, an die Kraft zu glauben, die Sie haben, um Ihre eigene Zukunft zu gestalten.
In diesem Gedenkjahr, das den 100. Jahrestag unserer Gründung markiert, sind wir stolz darauf, dass unsere Spielzeugtechnologie, die unser Geschäft ist, zu dieser großartigen Leistung beigetragen hat, und wir werden uns ausgehend von Asobi weiterhin neuen Herausforderungen stellen .
Wir fühlen uns geehrt, an der gemeinsamen Entwicklung eines transformierbaren Mondroboters beteiligt gewesen zu sein und eine Erkundungsmission auf der Mondoberfläche erfolgreich abgeschlossen zu haben.
Bei dieser gemeinsamen Forschung übernahm unser Unternehmen die Führung bei der Entwicklung eines Steuerungssystems und einer Bildverarbeitungstechnologie für einen Mondroboter mithilfe der SPRESENSETM-Platine von Sony Semiconductor Solutions, die mit einem intelligenten Sensorprozessor für IoT ausgestattet ist. Wir glauben, dass wir durch unsere gemeinsame Forschung die Möglichkeit des Einsatzes von Verbrauchergeräten in der rauen Umgebung des Weltraums demonstrieren konnten, was eine große Errungenschaft darstellt. Die Sony-Gruppe wird weiterhin aktiv neue Technologien entwickeln und ihre potenziellen Anwendungen, auch im Weltraum, erforschen und zu Forschung und Entwicklung beitragen, die zur Entwicklung unserer Zivilisation und der Nachhaltigkeit unseres Planeten beiträgt. Masu.
Ich bin sehr glücklich und dankbar, am SLIM-Projekt „Small Lunar Lander Demonstration Vehicle“ teilgenommen zu haben und dass SORA-Q, das Ergebnis einer gemeinsamen Forschung von vier Parteien, die Aufnahme von Bildern auf der Mondoberfläche geschafft hat. SORA-Q ist mit 80 mm sehr klein, aber ich glaube, dass dieses kleine Teilchen einen großen Beitrag zur zukünftigen Weltraumentwicklung leisten wird. Doshisha feiert nächstes Jahr sein 150-jähriges Jubiläum. Wir werden uns weiterhin neuen Herausforderungen stellen.
+
Einsatz der Multiband Spectroscopic Camera (MBC) an Bord des Small Lunar Lander Demonstrator (SLIM)
Bezüglich der Veröffentlichung fotografierter Bilder
25. Januar 2024 (Reiwa 6)
Japanische Agentur für Luft- und Raumfahrtforschung
Öffentliche Universitätsgesellschaft der Universität Aizu
Ritsumeikan Educational Corporation Ritsumeikan University
Die Japan Aerospace Exploration Agency (JAXA), die Universität Aizu und die Ritsumeikan-Universität werden Bilder veröffentlichen, die mit der Multiband Spectroscopic Camera (MBC) aufgenommen wurden, die auf dem Small Lunar Lander Demonstrator (SLIM) montiert ist.
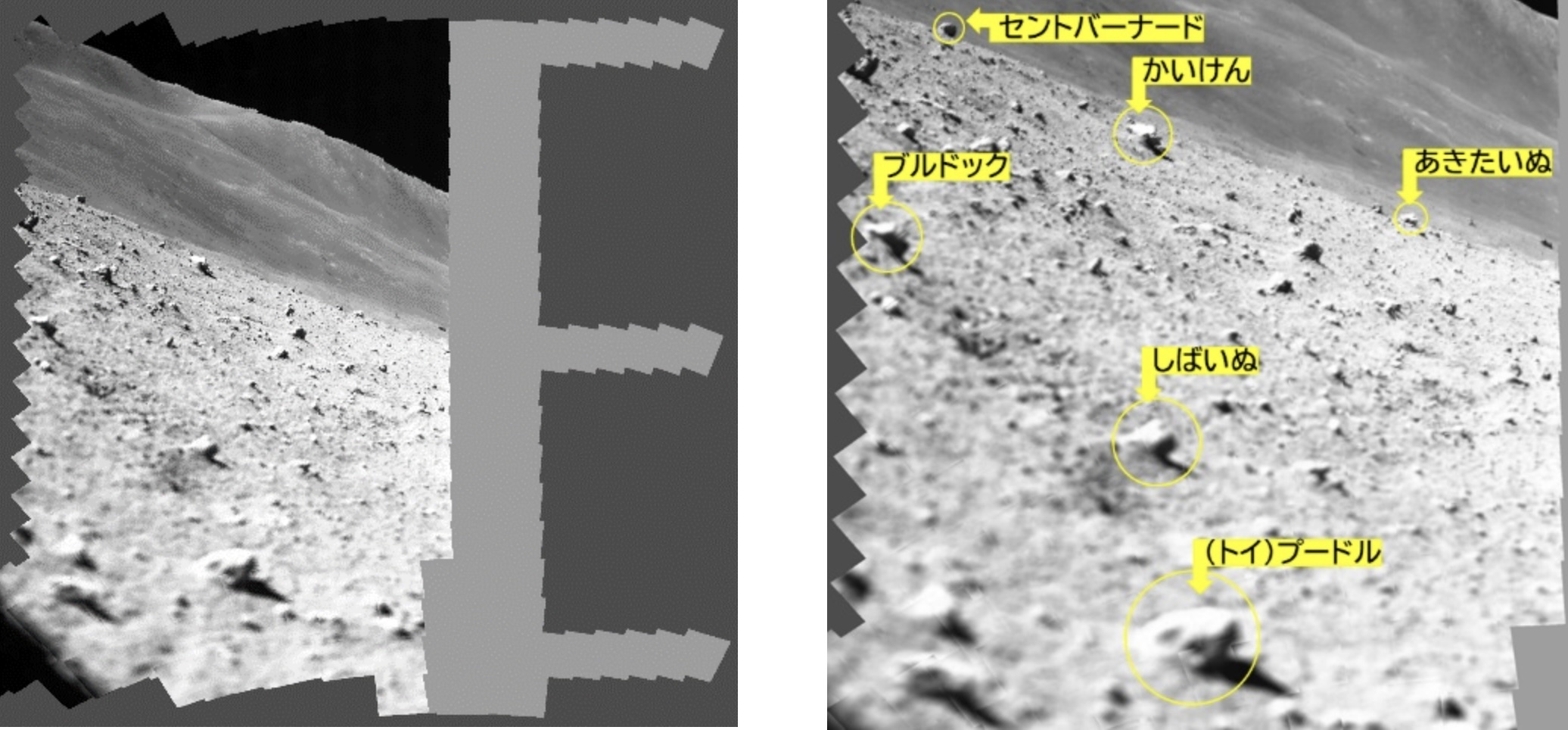
Abbildung 1: Mosaikbild des Mondoberflächenscans, aufgenommen von der mit SLIM ausgestatteten Multiband-Spektroskopkamera (MBC) (links) und deren vergrößerter Ansicht (rechts)
(Quelle: JAXA, Ritsumeikan University, University of Aizu)
Der graue Bereich auf der rechten Seite des Mosaikbilds ist der Bereich, in dem keine Daten vorhanden sind, weil der Scanvorgang abgebrochen wurde.
Nach der Landung auf dem Mond löste MBC den Verriegelungsmechanismus, um den Stößen beim Start und bei der Landung standzuhalten, bewegte den beweglichen Spiegel und führte einen Scanvorgang durch, um zu beobachtende Gesteine zu identifizieren. Abbildung 1 zeigt ein Landschaftsbild, das durch die Aufnahme und Kombination von 257 niedrig aufgelösten Schwarzweißbildern erstellt wurde. Basierend auf diesem Landschaftsbild wählen wir die zu beobachtenden Gesteine aus, geben ihnen Spitznamen, die eine Vorstellung von ihrer relativen Größe vermitteln, und bereiten uns auf die hochauflösende 10-Band-Spektroskopiebeobachtung vor, sobald die Stromversorgung wiederhergestellt ist. Wir machen weiter.
+
Outcome for the Smart Lander for Investigating Moon (SLIM) 's Moon Landing
January 25, 2024 (JST)
Japan Aerospace Exploration Agency
The Japan Aerospace Exploration Agency (JAXA) Smart Lander for Investigating Moon (SLIM) landed on the lunar surface on January 20, 2024 at 0:20 am JST, and communication was established with the Earth.
However, due to the spacecraft not being at the planned attitude upon landing, power generation was not possible from the solar cells, and the spacecraft was shutdown with a command from the ground at 2:57 am JST.
Analysis of the data acquired before shutting down the power confirmed that SLIM had reached the Moon’s surface approximately 55m east of the original target landing site. The positional accuracy before the commencement of the obstacle avoidance maneuver (at around a 50m altitude) which indicates the pinpoint landing performance, was evaluated to be at approximately 10m or less, possibly about 3 - 4m. While more detailed evaluation continues, it is reasonable to mention that the technology demonstration of pinpoint landing within an accuracy of 100m, which has been declared to be the main mission of SLIM, has been achieved.
All technical data on the navigation guidance leading to the landing, and navigation camera image data captured during the descent and on the lunar surface that is necessary for future pinpoint landing technology, was obtained from the spacecraft. The small probes (LEV-1 and LEV-2) were successfully separated just prior to landing in this contingency situation. The multi-band spectroscopic camera (MBC) onboard SLIM was also operated on a trial basis and captured images until the power was turned off.
Regarding the circumstances of how SLIM became stationary on the lunar surface at an attitude that could not generate power from the solar cells, the acquired technical data revealed that at an altitude of 50m just prior to the start of the obstacle avoidance maneuver, the thrust from one of the two main engines was most likely lost. Under these circumstances, the SLIM onboard software autonomously identifies the anomaly, and while controlling the horizontal position as much as possible, SLIM continued the descent with the other engine and moved gradually towards the east. The descent velocity at the time of contact with the ground was approximately 1.4 m/s or less, which was below the design range., but conditions such as the lateral velocity and attitude were outside the design range, and this is thought to have resulted in a different attitude than planned. The cause of the loss of the main engine functionality is now being investigated, including consideration of external factors aside from the engine itself, with the plan to determine the detailed cause. We will provide further information as the investigation progresses.
Regarding future activities, further analysis of the acquired technical and scientific data, as well as analysis of the cause of the anomalies that occurred, will proceed. Analysis of the data has shown that SLIM’s solar cells are currently facing west, suggesting that there is the possibility for power generation and thus recovery of SLIM as the sunlight illumination condition improves with time. Although SLIM’s activities on the Moon were originally expected to last only a few days, the necessary preparations for recovery will continue in order to acquire further technical and scientific data.
We will continue to keep you updated on the status of the project.
■ Image of the lunar surface captured by the SLIM onboard navigation camera after landing (credit: JAXA)

Note: the image is rotated to align with the direction of gravity.
■ Estimation of SLIM’s current location and the target landing site (credit: Chandrayaan-2:ISRO/SLIM:JAXA)
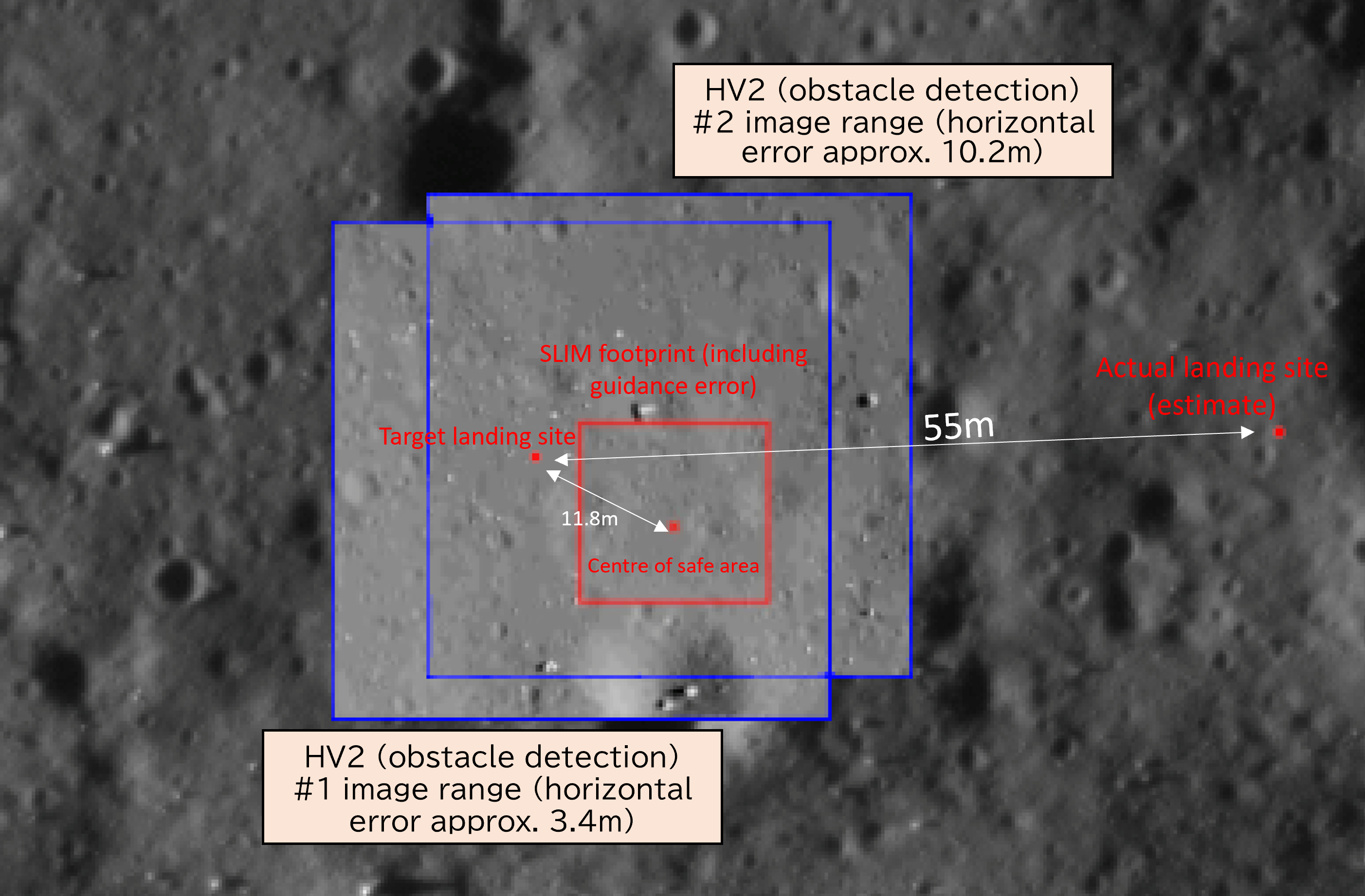
Note: Lunar topography captured by the Indian spacecraft Chandrayaan-2, overlaid with images acquired by the SLIM navigation camera during the HV2 (second hovering) at an altitude of about 50m. The two blue frames are images acquired during the obstacle detection at HV2. As the spacecraft subsequently enters the obstacle avoidance operation, the performance of the pinpoint landing is evaluated based on the positional accuracy at this point. The positional accuracy at the time of the first and second obstacle detection was respectively about 3 - 4m and 10m. Note that it is highly likely that the main engine was already affected by the loss of function when the second obstacle detection occurred. The SLIM footprint in the red frame is the safe landing zone set autonomously by SLIM based on the obstacle detection during HV2.
+++
Result and Achievements of the Lunar Excursion Vehicle (LEV-1) on board Smart Lander for Investigating Moon (SLIM)
January 25, 2024 (JST)
Japan Aerospace Exploration Agency
The Japan Aerospace Exploration Agency (JAXA) confirmed on January 20, 2024, that the Lunar Excursion Vehicle (LEV-1), a small robot deployed from the Smart Lander for Investigating Moon (SLIM), successfully conducted activities on the lunar surface. The telemetry data were sent directly from the small robot.
According to telemetry data, after deployment from SLIM, LEV-1 executed planned leaping movements and direct communication with ground stations, including inter-robot test radio wave data transmission from the Transformable Lunar Robot (LEV-2, nicknamed "SORA-Q"). On the other hand, image acquisition on the lunar surface has not been confirmed as of now.
Currently, LEV-1 has completed its planned operational period on the lunar surface, depleted its designated power, and is in a standby state on the lunar surface. While the capability to resume activity exists contingent on solar power generation from changes in the direction of the sun, efforts will be maintained to continue receiving signals from LEV-1.
Both LEV-1 and LEV-2 have become Japan's first lunar exploration robots. Additionally, the small LEV-1 with a mass of 2.1 kg (including a 90g communication device), achieved successful direct communication with Earth from the moon. This is considered as the world's smallest and lightest case of direct data transmission from approximately 380,000 kilometers away.
Furthermore, the accomplishment of LEV-1's leaping movements on the lunar surface, inter-robot communication between LEV-1 and LEV-2, and fully autonomous operations represent groundbreaking achievement. It would be regarded as a valuable technology demonstration for future lunar explorations, and the acquired knowledge and experience will be applied in upcoming missions. Moreover, the transmission of UHF band radio waves from LEV-1 as part of outreach efforts has encouraged participation from amateur radio operators globally, and we have been receiving reports of successful signal receptions. This initiative provided an opportunity for the public to be directly engaged in lunar exploration missions. We would like to extend our sincere gratitude to everyone involved in the LEV-1 mission.
+++
Images taken by the Multi-Band Camera (MBC) on board the Smart Lander for Investigating Moon (SLIM)
January 25, 2024 (JST)
Japan Aerospace Exploration Agency
The University of Aizu
Ritsumeikan University
The Japan Aerospace Exploration Agency (JAXA), along with the University of Aizu and Ritsumeikan University, has released images captured by the Multi-Band Camera (MBC) onboard the Smart Lander for Investigating Moon (SLIM).
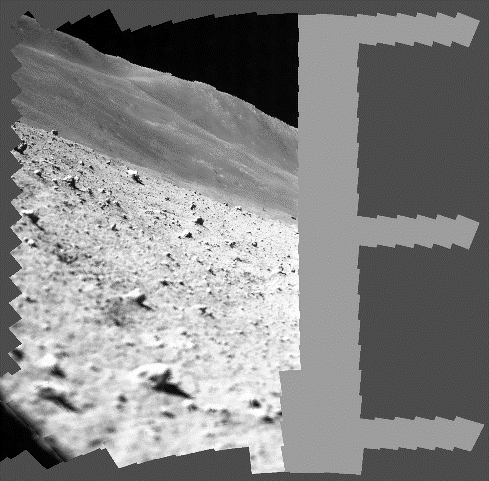
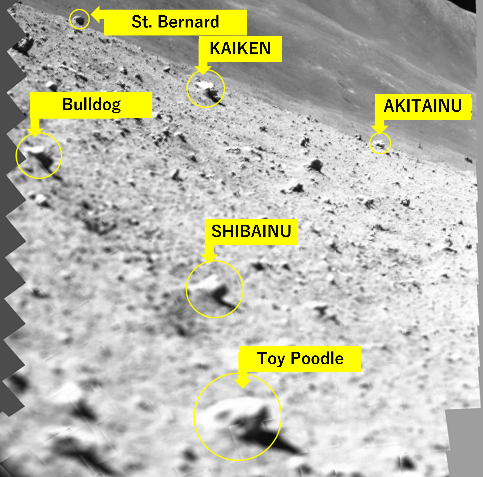
Figure 1:A lunar surface scan mosaic image captured by the SLIM-mounted MBC (left) and its enlarged view (right). (Credit: JAXA, RITSUMEIKAN UNIVERSITY, THE UNIVERSITY OF AIZU)
The grey area on the right of the mosaic lacks data due to the discontinuation of scanning operation.
After the moon landing and before shutting down of the spacecraft power, MBC released the locking mechanism to withstand the impact upon launch and landing, then conducted scanning operations. The scanning is performed by moving the adjustable mirror and is for preliminary examination of the rocks of scientific interest that are situated around the SLIM landing site. Figure 1 shows a landscape image created by synthesizing 257 low-resolution monochrome pictures. Based on this landscape image, the team is sorting out rocks of interest, assigning a nickname to each of them, with intent of communicating their relative sizes smoothly by the names. Preparation is underway to promptly conduct 10-band high-resolution spectroscopic observations once the solar illumination condition improves and SLIM recovers by the power generated by the solar array.
Quelle: JAXA
----
Update: 28.01.2024
.
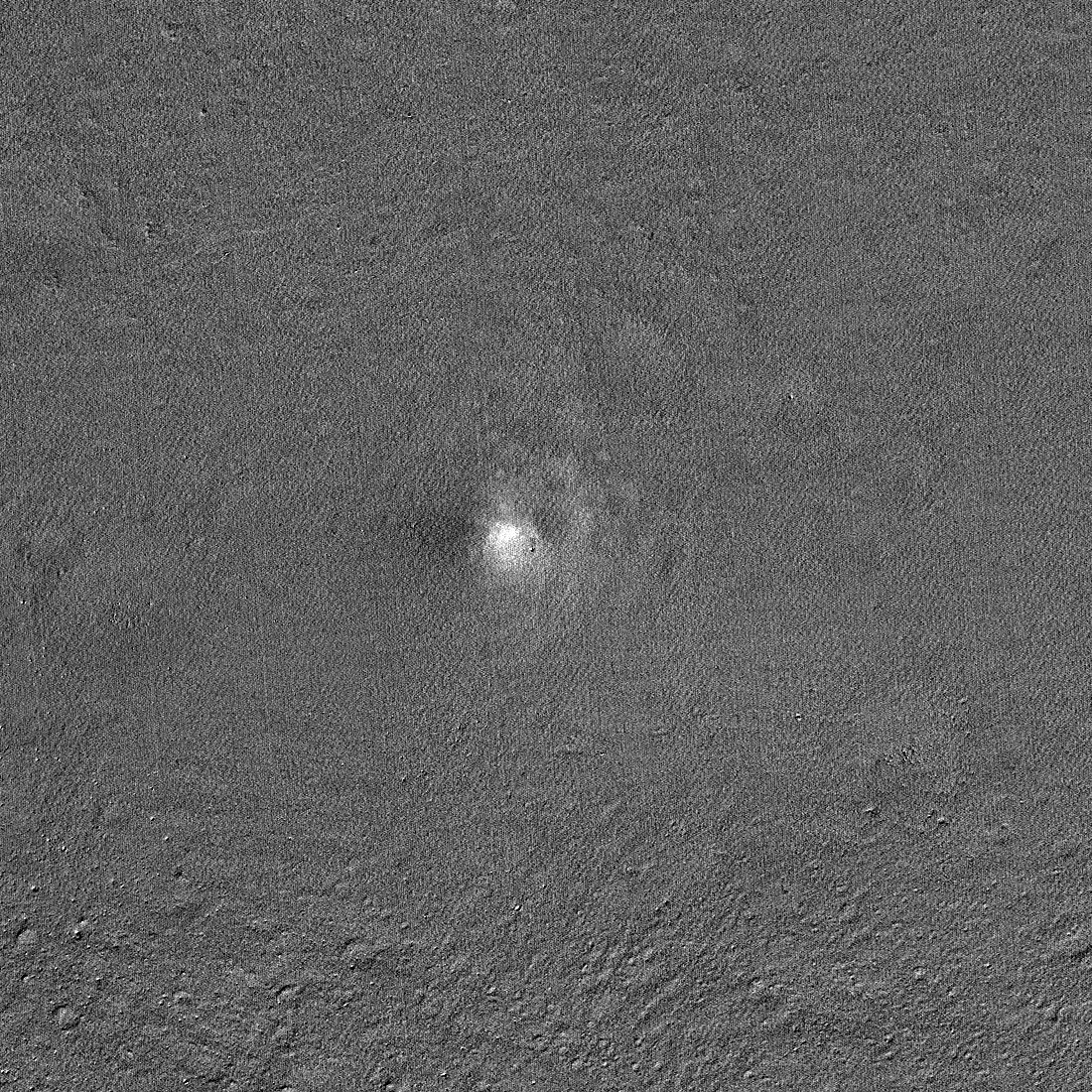
NASA’s LRO Spots Japan’s Moon Lander
On Jan. 19, 2024, at 10:20 a.m. EST, the JAXA (Japan Aerospace Exploration Agency) Smart Lander for Investigating Moon (SLIM) landed on the lunar surface. Five days later, NASA’s Lunar Reconnaissance Orbiter (LRO) spacecraft passed over the landing site and photographed SLIM.
Japan: Moon lander Slim comes back to life and resumes mission

With the Smart Lander for Investigating Moon (Slim) spacecraft, Japan became only the fifth country to achieve a soft touchdown on the Moon after the US, the former Soviet Union, China and India.
The spacecraft ran on battery power for several hours before authorities decided to turn it off to allow for a possible recovery of electricity when the angle of sunlight changed.
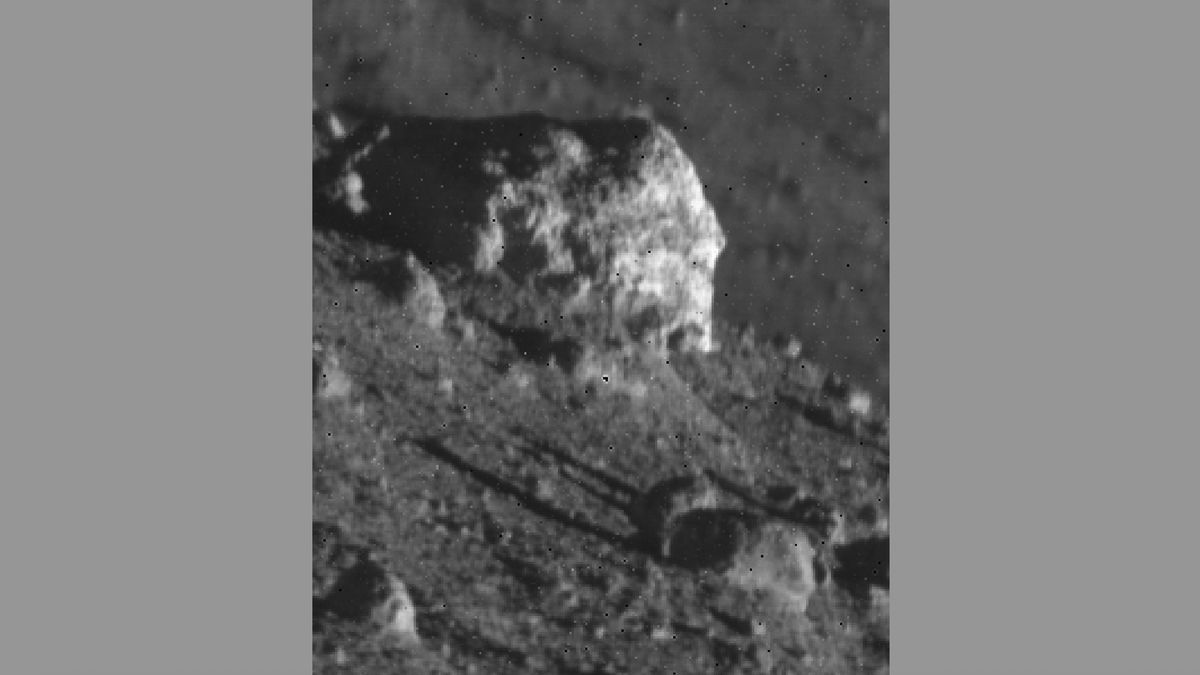
In a post on X, formerly Twitter, Jaxa shared a photograph taken by Slim of a nearby rock that it nicknamed a "toy poodle".
The lander will analyse the composition of rocks in its search for clues about the origin of the moon, Jaxa said.
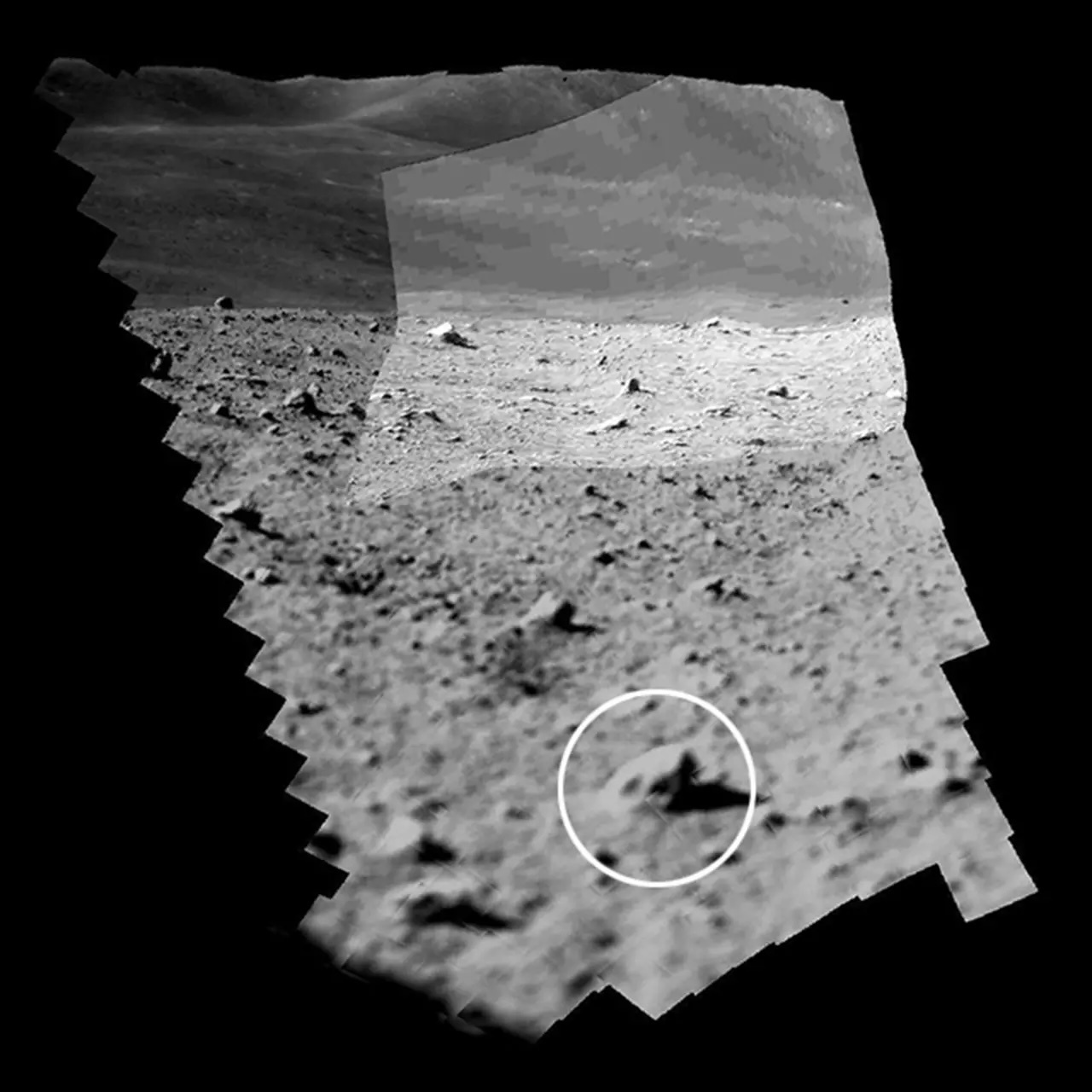
Slim will use an infrared camera to study the composition of a rock called "toy poodle" (circled)
lim landed at the edge of an equatorial crater known as Shioli, within 55m (180 ft) of its targeted touchdown location. Jaxa described it as an "unprecedented pinpoint landing".
The landing technology could allow future exploration of hilly Moon poles seen as a potential source of fuel, water and oxygen, the agency said.
The Slim mission came after earlier attempts by Japan failed, including one by the start-up iSpace, which saw its lunar lander crash when its onboard computer became confused about its altitude above the Moon.
Jaxa could not immediately say until when Slim will operate on the Moon. It has previously said the lander was not designed to survive a lunar night. A lunar night, which is when the surface of the Moon is not exposed to the Sun, lasts about 14 days.
Statistically, it has proven very hard to land on the Moon. Only about half of all attempts have succeeded.
Prior to Japan, India was the most recent nation to join the elite club of countries that have achieved this. Its Chandrayaan-3's rover touched down near the lunar south pole in August 2023 - an area on the Moon's surface that no human had reached before.
Earlier this month, a US spacecraft launched by a private operator ended its lunar mission in flames over the Pacific. In August last year, Russia's first lunar spacecraft in decades crashed into the Moon after spinning out of control.
Quelle: BBC
----
Update: 3.02.2024
.
Japan's SLIM moon lander snaps final photos before going dormant during lunar night
The spacecraft will sleep through the deep cold of lunar night — and may or may not wake up afterward.
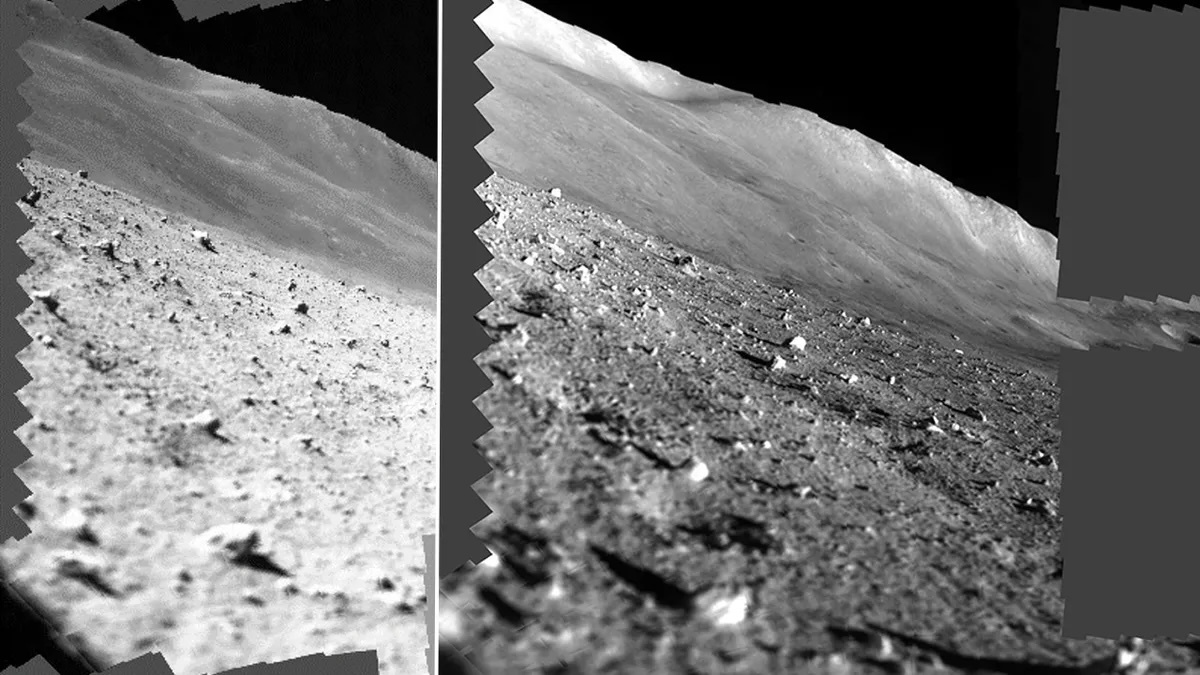
Mosaic images of the lunar surface captured by the Multiband Spectroscopic Camera (MBC) onboard Japan’s SLIM moon lander immediately after its Jan. 19 touchdown (left) and after power was restored about 10 days later (right). As the direction of the sun changed from east to west, so did the shadows cast on the lunar surface. (Image credit: JAXA)
Japan's historic SLIM moon lander has powered down ahead of a likely mission-ending cold lunar nighttime — but not before grabbing some final images and loads of science data.
SLIM, short for "Smart Lander for Investigating Moon," nailed its precision touchdown on the rim of Shioli crater on Jan. 19, despite engine troubles that saw it land nose-down. As a result, the spacecraft's solar cells face westward and are unable to receive the expected levels of sunlight, initially cutting operations on the lunar surface very short. But SLIM triumphantly reawakened nearly 10 days after landing, as the sun finally shone on its panels.
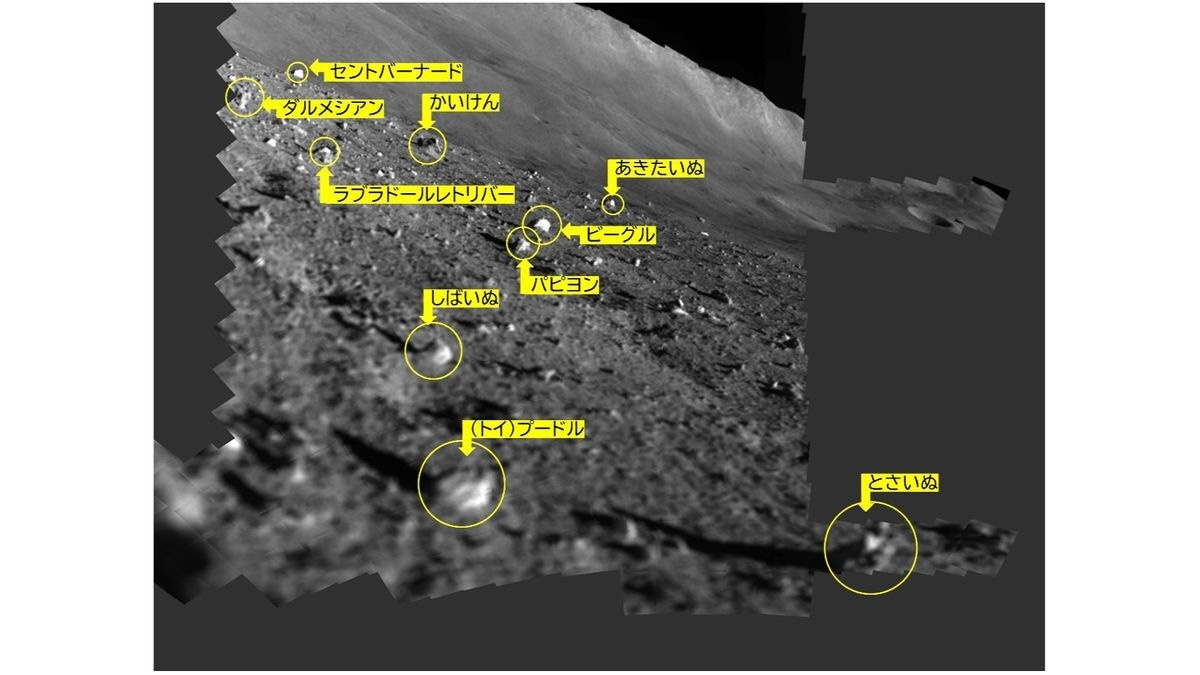
Image of the lunar surface captured by Japan's SLIM moon lander. Due to different solar radiation conditions over time, some rocks to be observed were changed and added. (Image credit: JAXA, Ritsumeikan University, University of Aizu)
The Japan Aerospace Exploration Agency (JAXA), which operates SLIM, has spent recent days scanning the nearby lunar surface with the spacecraft's Multi-Band Camera (MBC) to learn about its composition.
MBC is designed to scope out olivine and other minerals through analyzing the light signatures, or spectra, of reflected sunlight, according to the nonprofit Planetary Society.
JAXA's SLIM account on X, formerly Twitter, posted a final image taken by SLIM's navigation camera on Jan. 31 Japan time, while stating that the agency confirmed the spacecraft had entered a dormant state as expected.
JAXA will need to wait out the roughly 14.5-Earth-day-long lunar nighttime and then wait for favorable lighting and temperature conditions later in the next lunar daytime (which starts around Feb. 15) before SLIM can potentially be revived once more. For the probe to awake again, however, its electronics must hold up in the face of equatorial lunar nighttime temperatures of around minus 208 degrees Fahrenheit (minus 130 degrees Celsius).
But whether or not SLIM wakes up, the spacecraft has hit its full and extended mission goals by achieving a precision landing, deploying a pair of small rovers and demonstrating their interoperability, and obtaining a wealth of science data.
SLIM's X account also posted labeled images of targets of MBC's spectroscopic imaging, showing the various rocks and regolith that are being studied.
The lunar rock "Aki Inu," imaged in near-infrared light by the Multiband Spectroscopic Camera instrument on Japan's SLIM moon lander after power was restored. "Aki Tainu" is 2.07 feet (63 centimeters) wide and lies 59 feet (18 meters) from SLIM. (Image credit: JAXA , Ritsumeikan University, University of Aizu)
"Based on the large amount of data we have obtained, we are proceeding with analyses to identify rocks and estimate the chemical composition of minerals, which will help solve the mystery of the origin of the moon," a Google machine translation of a Feb. 1 JAXA statementread.
"We will announce scientific results as soon as they are obtained," the statement added.
Quelle: SC