
.

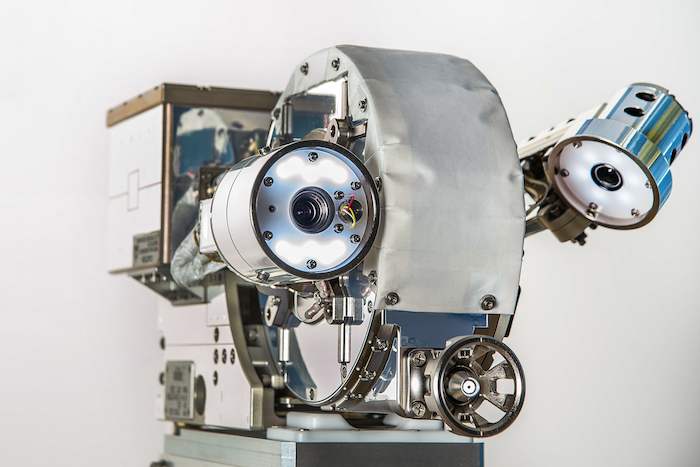
NASA’s satellite servicing team tests new robotic technologies, tools and techniques using the Robotic Refueling Mission module (white platform, bottom right) on the International Space Station.
-
Gas station attendant, electronics installer, home inspector: is there any fix-it job that NASA’s Robotic Refueling Mission (RRM) can’t tackle during its four-year career? As NASA takes a break in RRM operations, it’s looking back on past achievements and celebrating one of its latest accomplishments - the successful inspection of Canadarm2, the International Space Station’s (ISS) robotic arm. In time, this visual inspection capability may help future servicing ventures at other orbits inspect for damage and failures on their spacecraft.
Launched to the space station in 2011, the RRM experiment has long served as a modular, instructive proving ground to try out groundbreaking satellite-servicing tools, technologies and techniques. NASA engineers carefully curate the RRM investigations so that they can identify and mature the critical technologies needed to robotically refuel, diagnose and upgrade satellites – and then prove that these technologies work in orbit.
In October 2015, one of RRM’s latest technological debuts, the Visual Inspection Poseable Invertebrate Robot (VIPIR), had an opportunity to move from the training camp of RRM to helping a real client. This is a big moment for the team that developed these technologies, says Benjamin Reed, deputy project manager of NASA’s Satellite Servicing Capabilities Office (SSCO).
“It’s very rare for a demonstration tool to be used as part of day-to-day operations on a real mission,” Reed said. “We were thrilled to have this opportunity.”
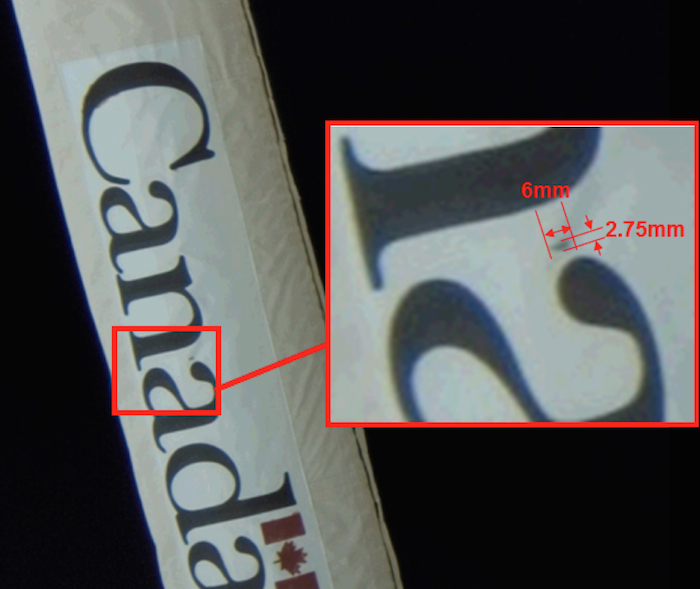
The tool’s client was the Canadarm2 space station robotic arm, known as the Space Station Remote Manipulator System (SSRMS). Since 2003, mission directors have been mystified by an unexplained black mark that appeared next to the “a” in the “Canada” logo that stretches across the robotic workhorse.
“The space station’s fixed cameras could only tell us so much,” says Ron Ticker, space station manager for development. “We suspected that it may have been a micrometeoroid strike, but without a closer look, we couldn’t conclusively determine what had happened to create this marking.”
Micrometeoroid and orbital debris, known throughout the space community as MMOD, is a constant threat for orbiting satellites. These tiny natural or manmade items, shooting through the space environment at speeds that can exceed 20,000 mph, can damage spacecraft, puncture instruments and disrupt operations.
The ISS office found its answer in VIPIR, a multi-camera inspection tool that the SSCO had built and then tested as part of the RRM program in May 2015. Its zoom lens provided the perfect avenue for a closer look at the mysterious black mark. On Oct. 9, 2015, robotic operators at NASA’s Johnson Space Center in Houston commanded the Canadian Space Agency’s Dextre – a twin-armed robot attached to the SSRMS – to maneuver VIPIR into position for an inspection.
“The results from VIPIR were phenomenal,” said Ticker. “From a distance of approximately eight inches, VIPIR was able to resolve details as small as three-thousandths of an inch (.003”) – about ten times thinner than the thickness of a credit card. From VIPIR’s footage, we were able to discern that the black mark was in fact a raised mass at the inspection site.”
The resolution from VIPIR is so clear and focused that that a viewer can count the individual fiber weaves of the thermal blanket material. Michael Rollins, Image Analyst with the Image Science and Analysis Group at Johnson, explained that if VIPIR had been positioned even closer to the robot arm, it would have been capable of even higher resolution of the worksite. However, space station proximity rules for robotic operations kept VIPIR farther back from the arm – a position that likely resulted in better lighting for the inspection.
The RRM team kept VIPIR’s camera trained on the area for more than two hours so they could take footage in both glaring sunlight, and during orbit night under the glow of the softer LED lights incorporated into the VIPIR tool itself.
“We were fascinated by the difference in the imagery under the dynamic lighting conditions found in low-Earth orbit,” said Ross Henry, the Vision Lead for VIPIR. “During the majority of the inspection, the imagery looked relatively the same with a limited amount of detail visible. However, at one point the sun illuminated the inspection site from the side (at an oblique angle), and the imagery changed completely. A shadow that was cast showed clearly the raised mass at the inspection site. This exercise helped us learn even more about what VIPIR can observe in orbit.”
The Image Science and Analysis Group is now analyzing the results from VIPIR’s inspection to determine the cause. Initial finds from a 3D analytical tool confirm the slightly elevated structure for most of the anomaly. Further work is planned to try to characterize internal detail within the raised mass. In the meantime, the RRM team is celebrating the other successful work they completed this fall.
As part of the October RRM operations, NASA also tested a new collection of satellite-servicing technologies and techniques. SSCO’s to-do list included practicing techniques leading up to coolant replenishment, testing electrical connection for “plug and play” space instruments, and working with decals that could help operations guided by machine vision go more smoothly. All RRM activities were declared a success.
During the week of Jan. 4, the team completed the last scientific objective on the RRM checklist: exposing a special set of solar cells to the sunlight to assess their performance. The RRM project is hosting this experiment in collaboration with NASA’s Glenn Research Center in Cleveland. On Jan. 8, the RRM task board holding this investigation entered the space station through the Japanese Experiment Module (JEM) airlock, where it was retrieved by the astronaut crew on Jan. 22, 2016. With that step done, the RRM investigation in its current form is now complete.
At a to-be-determined time, the original RRM module will be loaded onto a return vehicle from the ISS to be burned up during atmospheric re-entry. It is a bittersweet thought for the team, but they are satisfied with the work that they have accomplished. Already, they are looking forward to their next big projects on the space station.
Raven, a new technology test bed developed by SSCO, will demonstrate a robotic system that would allow spacecraft to perform autonomous, real-time, relative navigation with uncooperative objects. The investigation demonstrates sensor technologies that may be used on the Asteroid Redirect Mission and Orion spacecraft, as well as for satellite servicing. Raven launches to the space station in summer 2016.
Plans are well underway for RRM3, a new, separate module with experiments to demonstrate tools, technologies and techniques for cryogen replenishment and xenon recharge. These technologies are an important part of maintaining in-space capabilities that will take crew and cargo on the journey to Mars, said Ticker.
“Keep on watching the satellite servicing team,” said Frank Cepollina, associate director of SSCO. “The best is yet to come.”
.
On Oct. 9., 2015, NASA used the zoom lens (left) on VIPIR, a new inspection space tool, to examine an unexplained discoloration on the SSRMS, the Space Station Remote Manipulator System.
.
An unusual black mark on the Space Station Remote Manipulator System - a robotic arm on the International Space Station – had mystified mission directors.
.

VIPIR captured imagery that confirmed that there was a raised mass (center) on the SSRMS. The lighting conditions cast a shadow (extending to right of the mass site) that showed the presence of the object.
.

The Image Science and Analysis Group at Johnson is continuing to analyze the results from VIPIR’s inspection. 3D models (as shown in this GIF), built from VIPIR imagery and supplemental data, are helping the team better understand the raised mass on the space station’s arm.
Quelle: NASA
4336 Views