
13.07.2022
TAMPA, Fla. — Japanese startup GITAI plans to demonstrate robotic arm capabilities externally on the International Space Station for the first time next year.
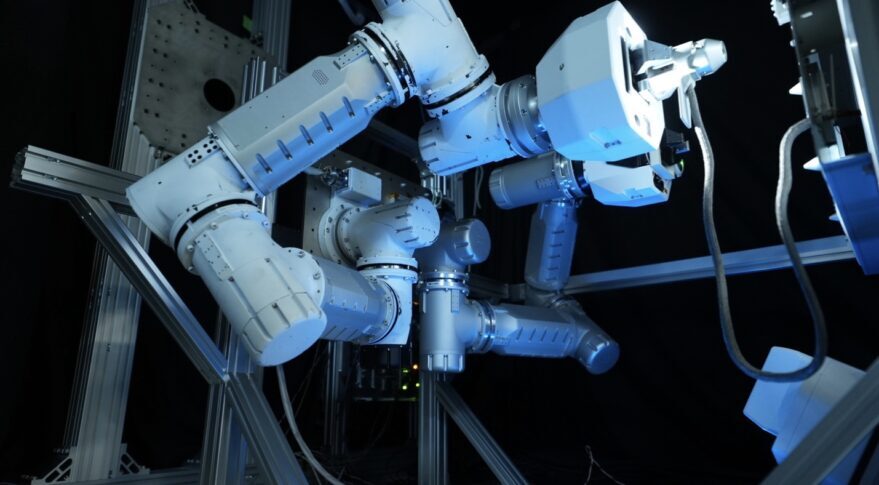
GITAI said July 11 its autonomous, 1.5-meter-long dual robotic arm system (S2) would be mounted on the Bishop Airlock, a module funded by U.S.-based Nanoracks.
The startup aims to achieve NASA’s Technology Readiness Level (TRL) 7 from the demonstration, confirming its feasibility as a technology that could be used in space.
S2 achieved TRL 6 in February after completing tasks inside a thermal vacuum chamber at Tsukuba Space Center, Japanese space agency JAXA’s headquarters in Japan.
GITAI first demonstrated its robotic technology onboard the ISS in 2021, when its S1 space system demonstrated the ability to assemble structures and operate switches from inside the Bishop Airlock.
Sho Nakanose, GITAI’s founder and CEO, said its latest tests bring the company closer to flight-qualified technology for applications beyond the ISS, including on-orbit servicing and lunar exploration.
“Our vision is to provide a safe and affordable means of labor in space, and this opportunity on the Bishop Airlock brings us one step closer to making that happen,” he said.
The ISS already features three, significantly longer robotic arms: Canada’s Canadarm2, the Japanese Experiment Module Remote Manipulator System (JEMRMS) and the European Robotic Arm (ERA) that launched last year.
U.S. expansion
GITAI announced June 22 it had opened its U.S. headquarters in Los Angeles and kicked off an engineering-focused recruitment drive to expand its operations.
The facility will be used for engineering, manufacturing, and business development efforts in the country.
The startup is also working with JAXA and Japanese automaker Toyota in Japan to develop a crewed pressurized rover for the moon’s surface.
GITAI is helping to develop a robotic arm for the Lunar Cruiser rover, slated to launch in the late 2020s.
Quelle: SN