
13.09.2019

NASA’s Lunar Reconnaissance Orbiter will try to locate India’s Vikram lander on the moon during a flyover of the landing site Tuesday. Indian space officials said they found the disabled spacecraft on the moon using the country’s own Chandrayaan 2 orbiter, but declined to release any images.
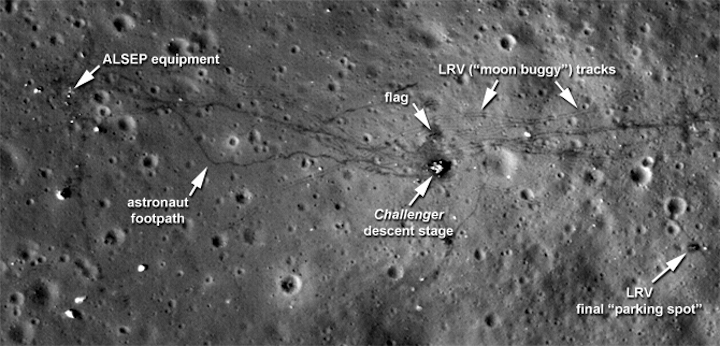
LRO’s high-resolution camera has taken aerial images of the Apollo landing sites with enough clarity to resolve the astronauts’ footprints left on the moon more than 40 years earlier. The NASA orbiter’s camera has also imaged China’s Chang’e 3 and Chang’e 4 landers on the moon, and located the crash site of the Israeli Beresheet spacecraft earlier this year.
Noah Petro, LRO’s project scientist at NASA’s Goddard Space Flight Center, said that the orbiter is due to fly over the Vikram landing site Tuesday, Sept. 17.
“Per NASA policy, all LRO data are publicly available,” Petro wrote in an email. “NASA will share any before and after flyover imagery of the area around the targeted Chandrayaan 2 Vikram lander landing site to support analysis by the Indian Space Research Organization.”
ISRO said Tuesday that the Chandrayaan 2 orbiter, which launched in tandem with the Vikram lander, has located the lander on the lunar surface.
“Vikram lander has been located by the orbiter of Chandrayaan 2, but no communication with it yet,” ISRO said in a brief statement. “All possible efforts are being made to establish communication with (the) lander.”
ISRO, India’s space agency, has not released any of the images purportedly showing the Vikram lander on the moon, and ISRO officials did not respond to Spaceflight Now’s request for additional details.
The Indian space agency has not confirmed whether the lander is intact on the lunar surface, or its orientation. It’s not clear Chandrayaan 2’s camera could resolve such details with certainty.
“We believe that (Vikram) made a harder landing than they desired on Friday evening,” said Lori Glaze, head of NASA’s planetary science division, in a presentation Tuesday to the National Academies’ Committee on Astrobiology and Planetary Sciences.
NASA’s Deep Space Network station near Madrid was in contact with the Vikram lander as it descended toward a landing site near the moon’s south pole Friday. The signal from the robotic lander suddenly ended moments before the scheduled touchdown, and the spacecraft apparently deviated from its planned trajectory at an altitude just below 6,500 feet, or 2 kilometers.
NASA tracking stations have attempted to contact the Vikram lander since last Friday, but as of Thursday, officials have not reestablished communication with the spacecraft. The lander was designed for survive on the lunar surface for 14 days, so time is limited.
The Vikram lander carried a rover named Pragyan — the Sanskrit word for “wisdom” — and several scientific instruments, including cameras, seismic sensors, rock composition payloads, and an underground thermal conductivity probe. Vikram, named for the father of India’s space program, also carried a U.S.-provided laser reflector, which NASA intended to use to make precise measurements of the distance between the Earth and the moon.

The Israeli Beresheet lander, which crashed on the moon in April, also carried a NASA laser retroreflector. A laser altimeter instrument on LRO is scanning the Beresheet landing site in an attempt to get a reflection off the instrument, which was entirely passive and may have survived the crash.
LRO could conduct similar search for Vikram’s laser retroreflector, Glaze said.
“We did have a NASA Laser Retroreflector Array flying on that mission, so we’ll look out for that as we go forward, just as we continue to look for the Laser Retroreflector Array that was on Beresheet,” Glaze said. “We’ll hopefully be getting some images of where that lander laid to rest.”
With a resolution of 32 centimeters, or 12.6 inches, the high-resolution camera on the Chandrayaan 2 orbiter can see more detail on the moon’s surface than any lunar orbiter mission to date. But the U.S. orbiter is plenty capable of finding Vikram, or its wreckage.
The Lunar Reconnaissance Orbiter Camera, or LROC, instrument has two narrow-angle cameras providing images with 50-centimeter-scale (19.7-inch) resolution. Managed at Arizona State University, LROC was developed by Malin Space Science Systems, and is based on the context camera carried aboard NASA’s Mars Reconnaissance Orbiter.
LROC is one of seven science instruments on LRO, but it’s received significant public attention through its ability to detect changes on the moon’s surface. It’s found fresh impact craters on the moon, in addition to its work locating landers and surveying landing sites for a range of commercial and international missions, including China’s moon landers, Chandrayaan 2, and future U.S. missions.
Petro said Monday’s pass over the Vikram landing site by LRO will be tough. The sun will be low on the horizon, creating long shadows on the surface.
If Monday’s imaging opportunity does not find Vikram, LRO will have additional flyovers in the coming weeks and months.
Meanwhile, Indian scientists are eager to begin analyzing data from the Chandrayaan 2 orbiter, which ISRO said should have a “long life of almost 7 years, instead of the planned one year” due to a precise launch and injection into lunar orbit.
“The orbiter has already been placed in its intended orbit around the moon and shall enrich our understanding of the moon’s evolution and mapping of the minerals and water molecules in the polar regions, using its eight state-of-the-art scientific instruments,” ISRO said. “The orbiter camera is the highest-resolution camera in any lunar (orbiter) mission so far, and shall provide high-resolution images, which will be immensely useful to the global scientific community.”
Before losing contact with the Vikram lander, the craft performed well during powered descent toward the moon’s surface.
“All the systems and sensors of the lander functioned excellently until this point and proved many new technologies, such as variable thrust propulsion technology used in the lander,” ISRO said.
Quelle: SN